 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing Geometry to Detect Grasps in 3D Point Clouds
Paper and Code
Apr 29, 2015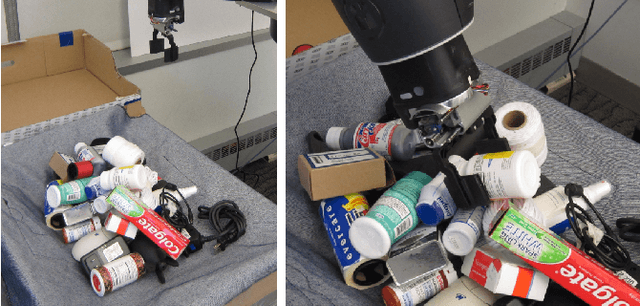

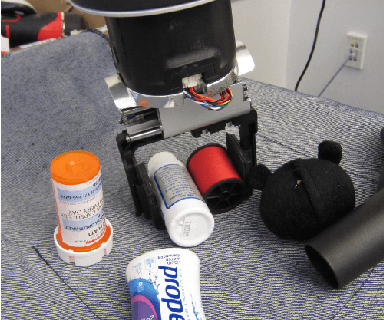

This paper proposes a new approach to detecting grasp points on novel objects presented in clutter. The input to our algorithm is a point cloud and the geometric parameters of the robot hand. The output is a set of hand configurations that are expected to be good grasps. Our key idea is to use knowledge of the geometry of a good grasp to improve detection. First, we use a geometrically necessary condition to sample a large set of high quality grasp hypotheses. We were surprised to find that using simple geometric conditions for detection can result in a relatively high grasp success rate. Second, we use the notion of an antipodal grasp (a standard characterization of a good two fingered grasp) to help us classify these grasp hypotheses. In particular, we generate a large automatically labeled training set that gives us high classification accuracy. Overall, our method achieves an average grasp success rate of 88% when grasping novels objects presented in isolation and an average success rate of 73% when grasping novel objects presented in dense clutter. This system is available as a ROS package at http://wiki.ros.org/agile_grasp.