 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUrbanNet: Leveraging Urban Maps for Long Range 3D Object Detection
Paper and Code
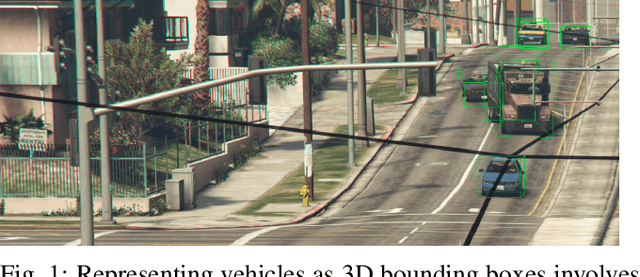
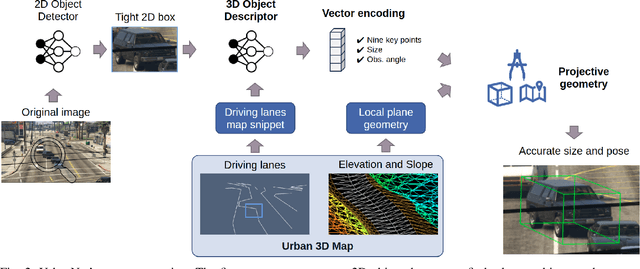
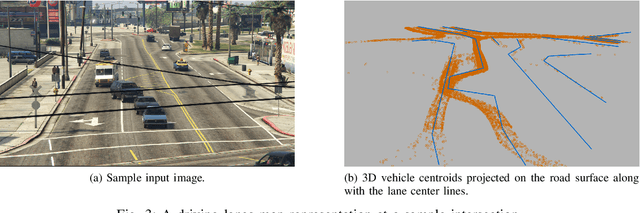
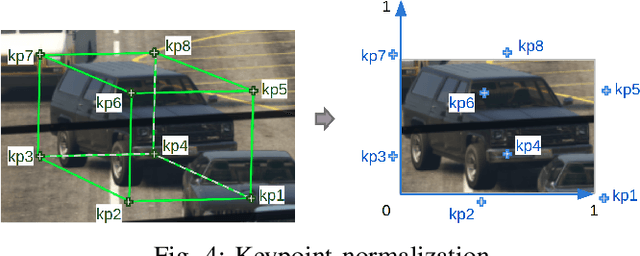
Relying on monocular image data for precise 3D object detection remains an open problem, whose solution has broad implications for cost-sensitive applications such as traffic monitoring. We present UrbanNet, a modular architecture for long range monocular 3D object detection with static cameras. Our proposed system combines commonly available urban maps along with a mature 2D object detector and an efficient 3D object descriptor to accomplish accurate detection at long range even when objects are rotated along any of their three axes. We evaluate UrbanNet on a novel challenging synthetic dataset and highlight the advantages of its design for traffic detection in roads with changing slope, where the flat ground approximation does not hold. Data and code are available at https://github.com/TRAILab/UrbanNet