 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnsupervised Discovery of Object-Centric Neural Fields
Paper and Code
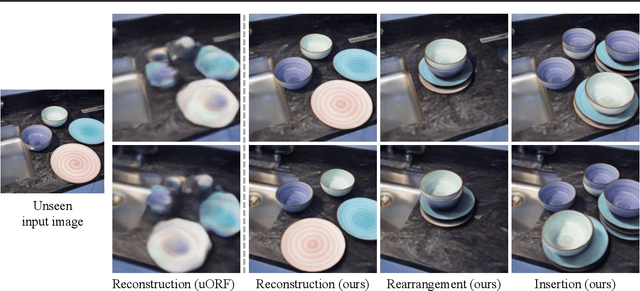
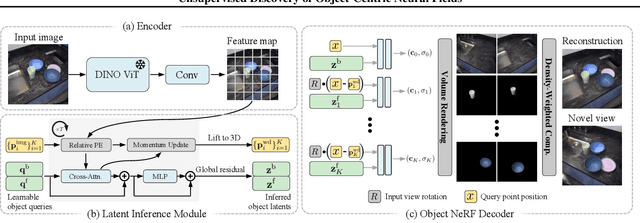
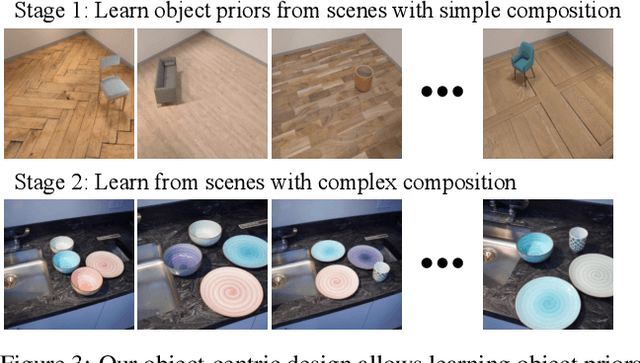
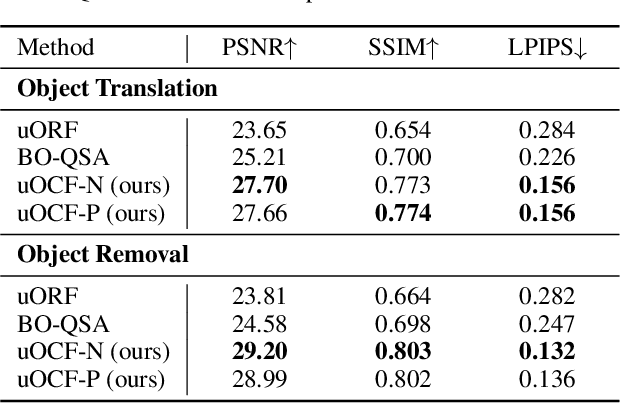
We study inferring 3D object-centric scene representations from a single image. While recent methods have shown potential in unsupervised 3D object discovery from simple synthetic images, they fail to generalize to real-world scenes with visually rich and diverse objects. This limitation stems from their object representations, which entangle objects' intrinsic attributes like shape and appearance with extrinsic, viewer-centric properties such as their 3D location. To address this bottleneck, we propose Unsupervised discovery of Object-Centric neural Fields (uOCF). uOCF focuses on learning the intrinsics of objects and models the extrinsics separately. Our approach significantly improves systematic generalization, thus enabling unsupervised learning of high-fidelity object-centric scene representations from sparse real-world images. To evaluate our approach, we collect three new datasets, including two real kitchen environments. Extensive experiments show that uOCF enables unsupervised discovery of visually rich objects from a single real image, allowing applications such as 3D object segmentation and scene manipulation. Notably, uOCF demonstrates zero-shot generalization to unseen objects from a single real image. Project page: https://red-fairy.github.io/uOCF/