 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnleashing the Potential of Reconfigurable Intelligent Surfaces in Martian Communication
Paper and Code
Aug 10, 2023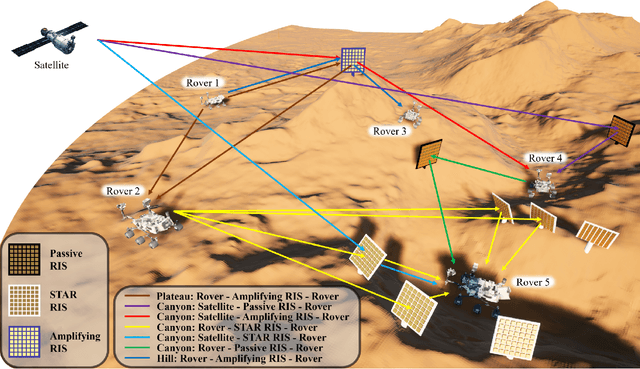
Space exploration has witnessed a steady increase since the 1960s, with Mars playing a significant role in our quest for further knowledge. As the ambition to colonize Mars becomes a reality through the collaboration of private companies and space agencies, the need for reliable and robust communication infrastructures in the Martian environment becomes paramount. In this context, reconfigurable intelligent surface (RIS)-empowered communication emerges as a promising technology to enhance the coverage and improve the communication quality. By considering various Martian scenarios such as canyons, craters, mountains, and plateaus, this article explores of the potential of RISs in increasing the coverage in Martian environments, thereby enabling future Mars missions to be more robust and reliable. The article also investigates the application of RIS-assisted localization in both line-of-sight (LOS) and non-line-of-sight (NLOS) scenarios, presenting a general framework for accurate user angle estimation in challenging Martian conditions. The findings and presented framework of this article provide a promising research direction for integrating RISs in deep space communication as well as paving the way for future improvements in interplanetary communication networks.