Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransfer Learning and Organic Computing for Autonomous Vehicles
Paper and Code
Aug 16, 2018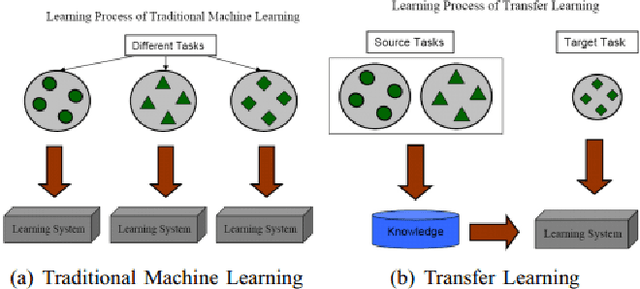
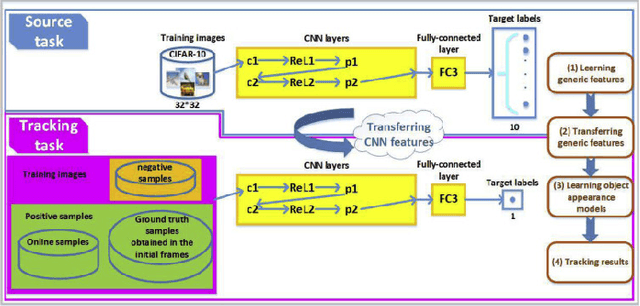
Autonomous Vehicles(AV) are one of the brightest promises of the future which would help cut down fatalities and improve travel time while working in harmony. Autonomous vehicles will face with challenging situations and experiences not seen before. These experiences should be converted to knowledge and help the vehicle prepare better in the future. Online Transfer Learning will help transferring prior knowledge to a new task and also keep the knowledge updated as the task evolves. This paper presents the different methods of transfer learning, online transfer learning and organic computing that could be adapted to the domain of autonomous vehicles.
* 5 pages, 2 figures, survey of papers and methods in transfer
learning, organic computing and online transfer learning
View paper on