 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajectory Tracking for MmWave Communication Systems via Cooperative Passive Sensing
Paper and Code
Sep 30, 2024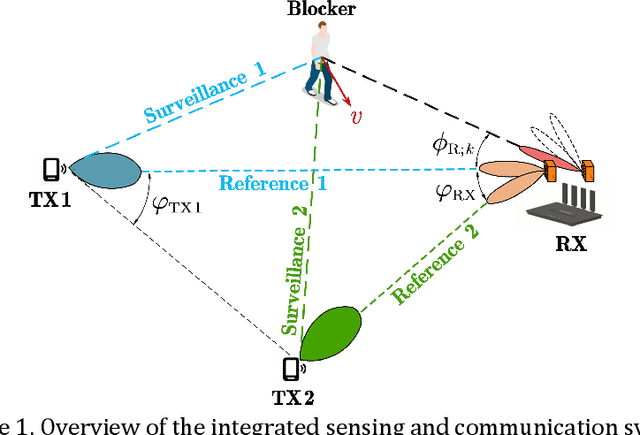
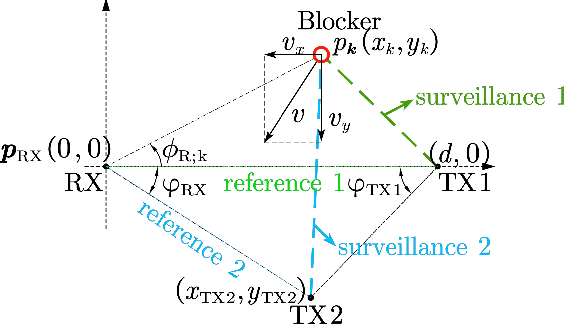
In this paper, a cooperative passive sensing framework for millimeter wave (mmWave) communication systems is proposed and demonstrated in a scenario with one mobile signal blocker. Specifically, in the uplink communication with at least two transmitters, a cooperative detection method is proposed for the receiver to track the blocker's trajectory, localize the transmitters and detect the potential link blockage jointly. To facilitate detection, the receiver collects the signal of each transmitter along a line-of-sight (LoS) path and a non-line-of-sight (NLoS) path separately via two narrow-beam phased arrays. The latter path should scatter at the mobile blocker, and hence it can be identified by the Doppler frequency. Comparing the received signals of both paths, the Doppler frequency and angle-of-arrival (AoA) of the NLoS path can be estimated. To resolve the blocker's trajectory and the transmitters' locations, the receiver should continuously track the mobile blocker to accumulate sufficient numbers of the Doppler frequency and AoA versus time observations. Finally, a gradient-descent-based algorithm is proposed for joint detection. With the reconstructed trajectory, the potential link blockage can be predicted. It is demonstrated that the system can achieve decimeter-level localization and trajectory estimation, and predict the blockage time with an error less than 0.1 s.