 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTraffic Camera Calibration via Vehicle Vanishing Point Detection
Paper and Code



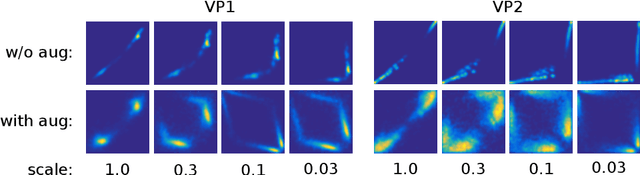
In this paper we propose a traffic surveillance camera calibration method based on detection of pairs of vanishing points associated with vehicles in the traffic surveillance footage. To detect the vanishing points we propose a CNN which outputs heatmaps in which the positions of vanishing points are represented using the diamond space parametrization which enables us to detect vanishing points from the whole infinite projective space. From the detected pairs of vanishing points for multiple vehicles in a scene we establish the scene geometry by estimating the focal length of the camera and the orientation of the road plane. We show that our method achieves competitive results on the BrnoCarPark dataset while having fewer requirements than the current state of the art approach.