 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTracking the Race Between Deep Reinforcement Learning and Imitation Learning -- Extended Version
Paper and Code
Aug 03, 2020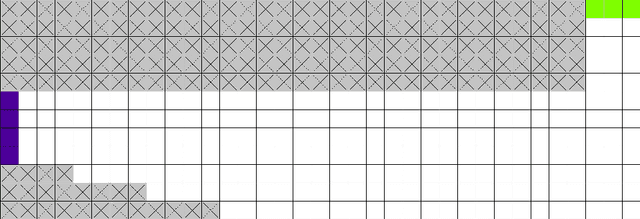
Learning-based approaches for solving large sequential decision making problems have become popular in recent years. The resulting agents perform differently and their characteristics depend on those of the underlying learning approach. Here, we consider a benchmark planning problem from the reinforcement learning domain, the Racetrack, to investigate the properties of agents derived from different deep (reinforcement) learning approaches. We compare the performance of deep supervised learning, in particular imitation learning, to reinforcement learning for the Racetrack model. We find that imitation learning yields agents that follow more risky paths. In contrast, the decisions of deep reinforcement learning are more foresighted, i.e., avoid states in which fatal decisions are more likely. Our evaluations show that for this sequential decision making problem, deep reinforcement learning performs best in many aspects even though for imitation learning optimal decisions are considered.