 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Social HRI for Improving Children's Healthcare Experiences
Paper and Code
Oct 09, 2020
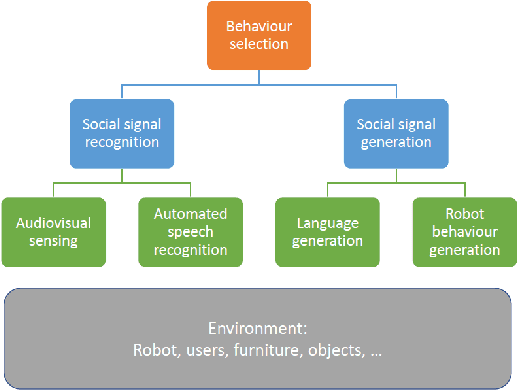
This paper describes a new research project that aims to develop a social robot designed to help children cope with painful and distressing medical procedures in a clinical setting. While robots have previously been trialled for this task, with promising initial results, the systems have tended to be teleoperated, limiting their flexibility and robustness. This project will use epistemic planning techniques as a core component for action selection in the robot system, in order to generate plans that include physical, sensory, and social actions for interacting with humans. The robot will operate in a task environment where appropriate and safe interaction with children, parents/caregivers, and healthcare professionals is required. In addition to addressing the core technical challenge of building an autonomous social robot, the project will incorporate co-design techniques involving all participant groups, and the final robot system will be evaluated in a two-site clinical trial.