 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Planning and Control of Hybrid Systems with Limit Cycle using LQR Trees
Paper and Code
Nov 11, 2017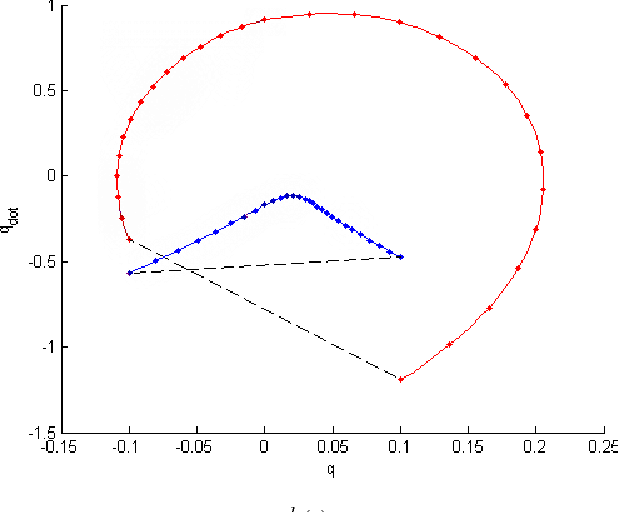
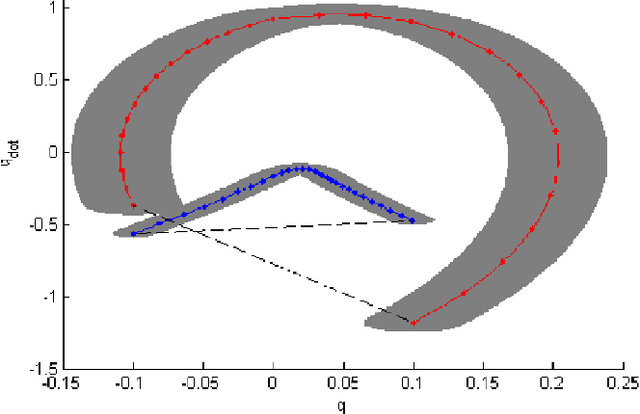

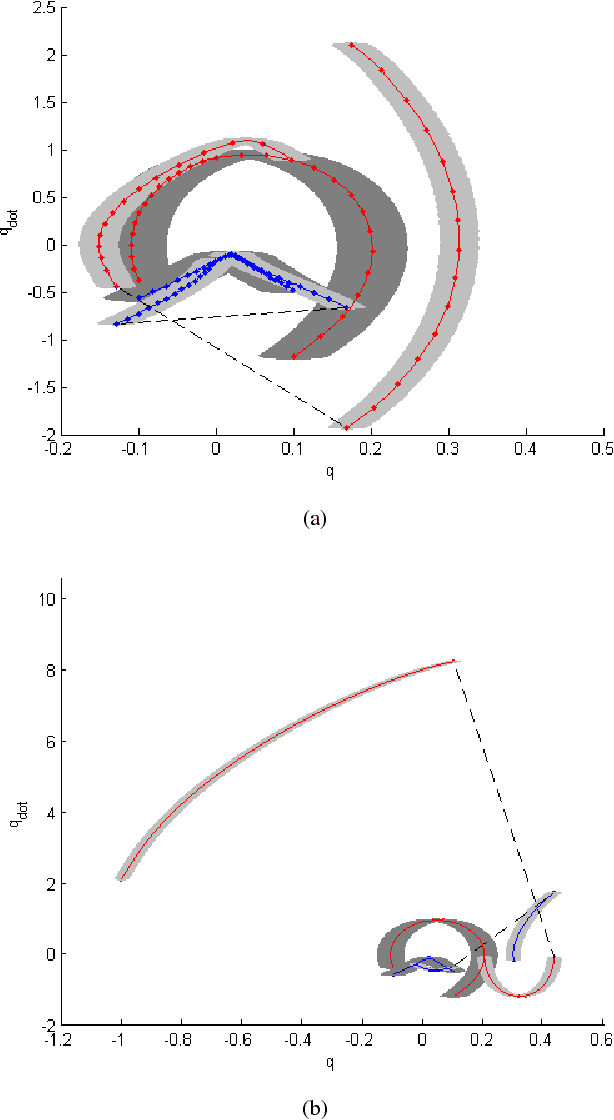
We present a multi-query recovery policy for a hybrid system with goal limit cycle. The sample trajectories and the hybrid limit cycle of the dynamical system are stabilized using locally valid Time Varying LQR controller policies which probabilistically cover a bounded region of state space. The original LQR Tree algorithm builds such trees for non-linear static and non-hybrid systems like a pendulum or a cart-pole. We leverage the idea of LQR trees to plan with a continuous control set, unlike methods that rely on discretization like dynamic programming to plan for hybrid dynamical systems where it is hard to capture the exact event of discrete transition. We test the algorithm on a compass gait model by stabilizing a dynamic walking hybrid limit cycle with point foot contact from random initial conditions. We show results from the simulation where the system comes back to a stable behavior with initial position or velocity perturbation and noise.