Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards lightweight convolutional neural networks for object detection
Paper and Code
Oct 05, 2017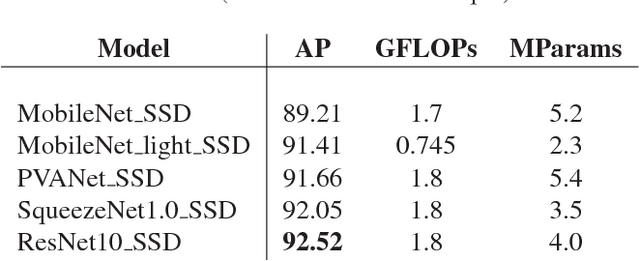
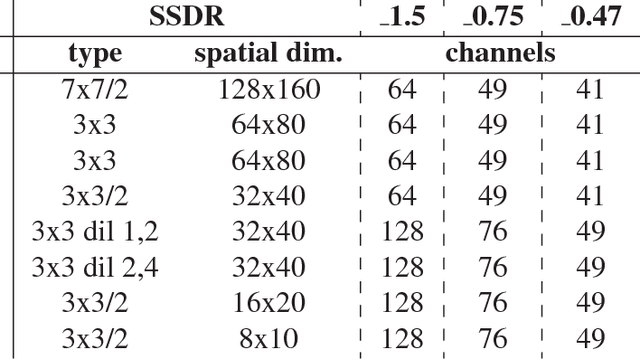


We propose model with larger spatial size of feature maps and evaluate it on object detection task. With the goal to choose the best feature extraction network for our model we compare several popular lightweight networks. After that we conduct a set of experiments with channels reduction algorithms in order to accelerate execution. Our vehicle detection models are accurate, fast and therefore suit for embedded visual applications. With only 1.5 GFLOPs our best model gives 93.39 AP on validation subset of challenging DETRAC dataset. The smallest of our models is the first to achieve real-time inference speed on CPU with reasonable accuracy drop to 91.43 AP.
* Submitted to the International Workshop on Traffic and Street
Surveillance for Safety and Security (IWT4S) in conjunction with the 14th
IEEE International Conference on Advanced Video and Signal based Surveillance
(AVSS 2017)
View paper on