 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTo Share or Not to Share? Performance Guarantees and the Asymmetric Nature of Cross-Robot Experience Transfer
Paper and Code
Jun 29, 2020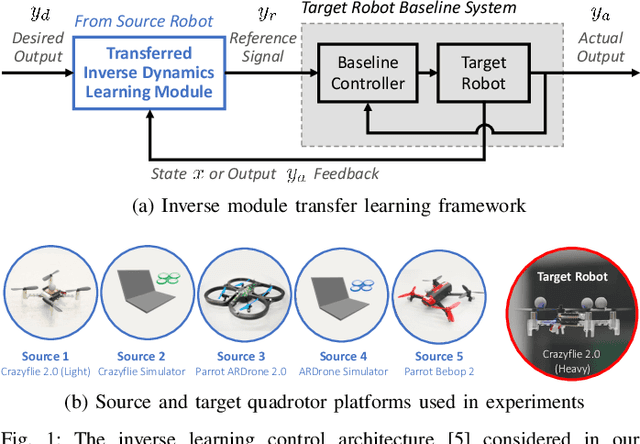
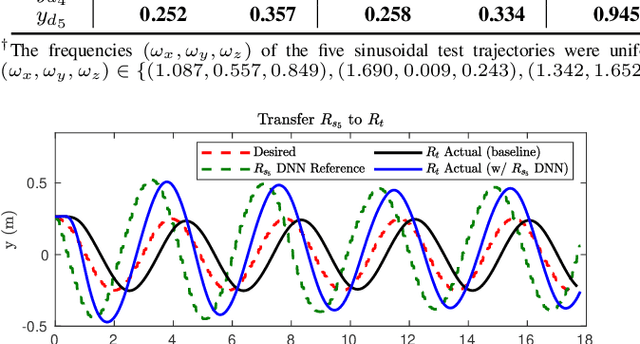
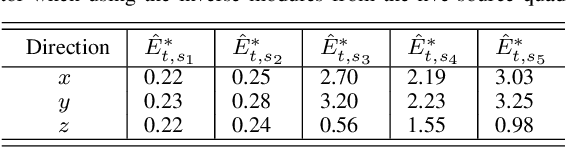

In the robotics literature, experience transfer has been proposed in different learning-based control frameworks to minimize the costs and risks associated with training robots. While various works have shown the feasibility of transferring prior experience from a source robot to improve or accelerate the learning of a target robot, there are usually no guarantees that experience transfer improves the performance of the target robot. In practice, the efficacy of transferring experience is often not known until it is tested on physical robots. This trial-and-error approach can be extremely unsafe and inefficient. Building on our previous work, in this paper we consider an inverse module transfer learning framework, where the inverse module of a source robot system is transferred to a target robot system to improve its tracking performance on arbitrary trajectories. We derive a theoretical bound on the tracking error when a source inverse module is transferred to the target robot and propose a Bayesian-optimization-based algorithm to estimate this bound from data. We further highlight the asymmetric nature of cross-robot experience transfer that has often been neglected in the literature. We demonstrate our approach in quadrotor experiments and show that we can guarantee positive transfer on the target robot for tracking random periodic trajectories.