 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTime regularization as a solution to mitigate quantization induced performance degradation
Paper and Code
Oct 30, 2020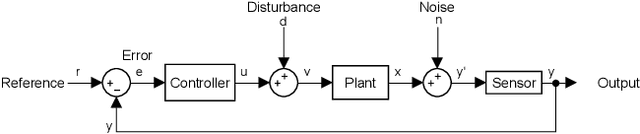
Reset control is known to be able to outperform PID and the like linear controllers. However, in motion control systems, quantization can cause severe performance degradation. This paper shows the application of time regularization to mitigate this practical issue in reset control systems. Numerical simulations have been conducted in order to analyze the cause of the quantization induced performance degradation and the effectiveness of time regularization to mitigate this degradation; with tuning guidelines for the time regularization parameter also provided. Moreover, a robustness analysis is performed. The solution is also tested experimentally on a high precision motion system for validation. It is estimated by numerical simulations that time regularization can reduce quantization induced performance degradation by almost 10 dB. Experiments have similarly shown a reduction of several dB for the high precision motion stage.