 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Power of Online Learning in Stochastic Network Optimization
Paper and Code
Jul 29, 2014
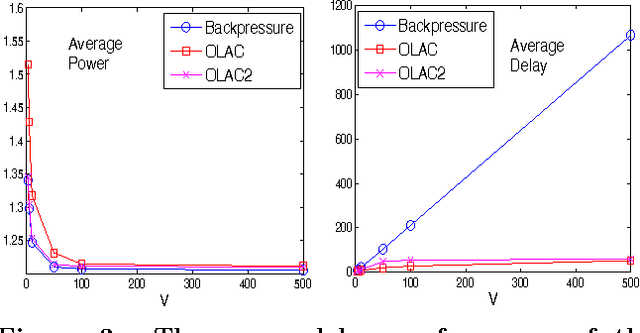
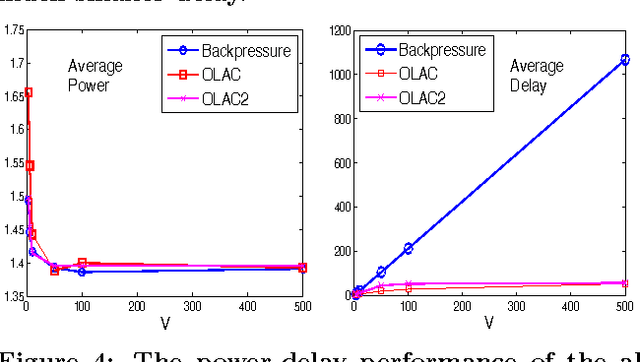
In this paper, we investigate the power of online learning in stochastic network optimization with unknown system statistics {\it a priori}. We are interested in understanding how information and learning can be efficiently incorporated into system control techniques, and what are the fundamental benefits of doing so. We propose two \emph{Online Learning-Aided Control} techniques, $\mathtt{OLAC}$ and $\mathtt{OLAC2}$, that explicitly utilize the past system information in current system control via a learning procedure called \emph{dual learning}. We prove strong performance guarantees of the proposed algorithms: $\mathtt{OLAC}$ and $\mathtt{OLAC2}$ achieve the near-optimal $[O(\epsilon), O([\log(1/\epsilon)]^2)]$ utility-delay tradeoff and $\mathtt{OLAC2}$ possesses an $O(\epsilon^{-2/3})$ convergence time. $\mathtt{OLAC}$ and $\mathtt{OLAC2}$ are probably the first algorithms that simultaneously possess explicit near-optimal delay guarantee and sub-linear convergence time. Simulation results also confirm the superior performance of the proposed algorithms in practice. To the best of our knowledge, our attempt is the first to explicitly incorporate online learning into stochastic network optimization and to demonstrate its power in both theory and practice.