 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Metric-FF Planning System: Translating "Ignoring Delete Lists" to Numeric State Variables
Paper and Code
Jun 26, 2011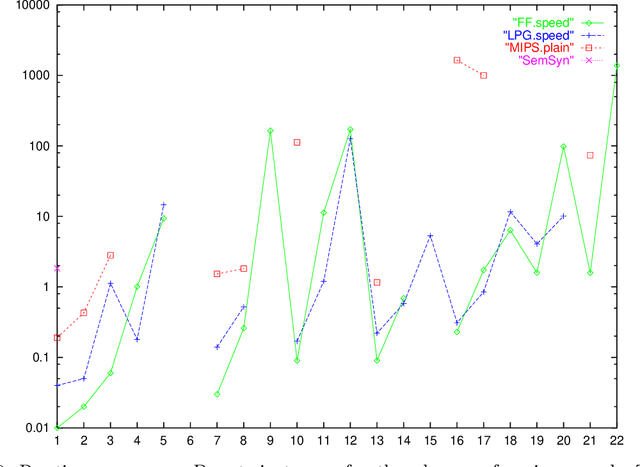
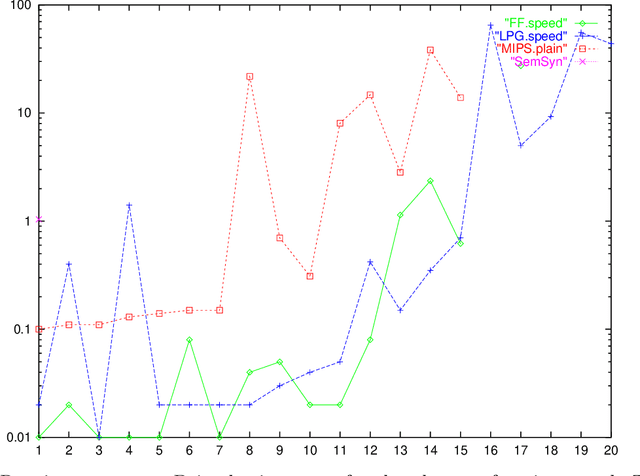
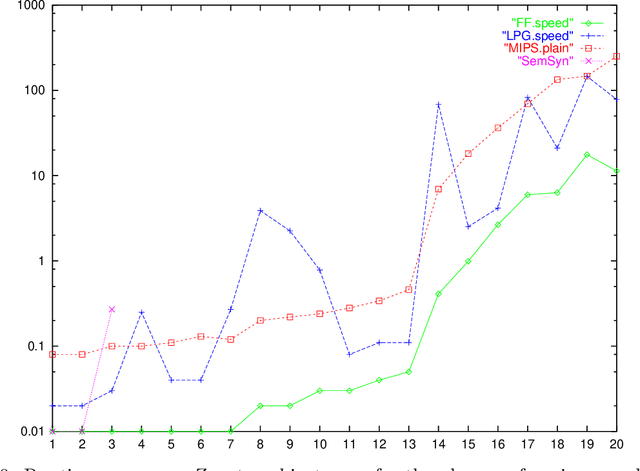

Planning with numeric state variables has been a challenge for many years, and was a part of the 3rd International Planning Competition (IPC-3). Currently one of the most popular and successful algorithmic techniques in STRIPS planning is to guide search by a heuristic function, where the heuristic is based on relaxing the planning task by ignoring the delete lists of the available actions. We present a natural extension of ``ignoring delete lists'' to numeric state variables, preserving the relevant theoretical properties of the STRIPS relaxation under the condition that the numeric task at hand is ``monotonic''. We then identify a subset of the numeric IPC-3 competition language, ``linear tasks'', where monotonicity can be achieved by pre-processing. Based on that, we extend the algorithms used in the heuristic planning system FF to linear tasks. The resulting system Metric-FF is, according to the IPC-3 results which we discuss, one of the two currently most efficient numeric planners.