 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe FF Planning System: Fast Plan Generation Through Heuristic Search
Paper and Code
Jun 03, 2011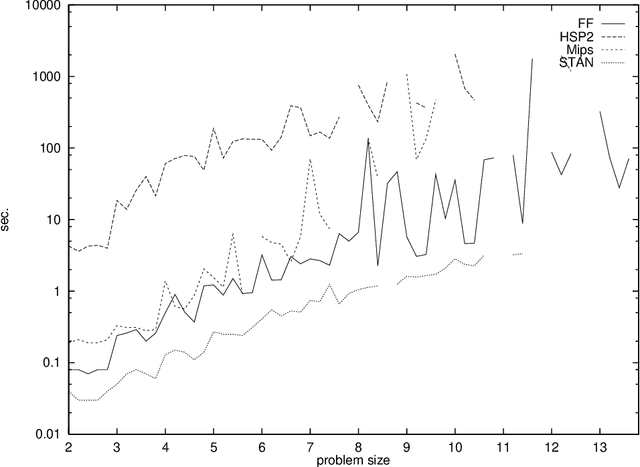
We describe and evaluate the algorithmic techniques that are used in the FF planning system. Like the HSP system, FF relies on forward state space search, using a heuristic that estimates goal distances by ignoring delete lists. Unlike HSP's heuristic, our method does not assume facts to be independent. We introduce a novel search strategy that combines hill-climbing with systematic search, and we show how other powerful heuristic information can be extracted and used to prune the search space. FF was the most successful automatic planner at the recent AIPS-2000 planning competition. We review the results of the competition, give data for other benchmark domains, and investigate the reasons for the runtime performance of FF compared to HSP.