 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Cyborg Astrobiologist: First Field Experience
Paper and Code
Oct 27, 2004
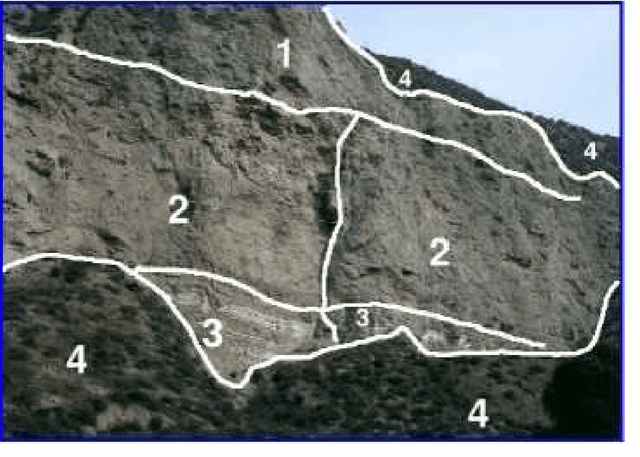
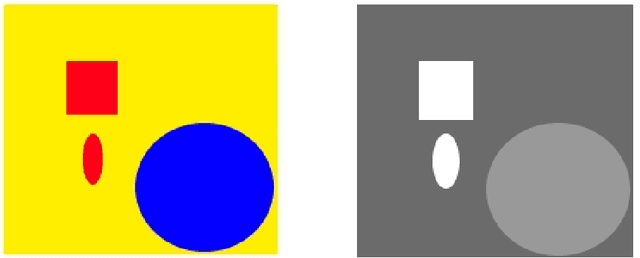
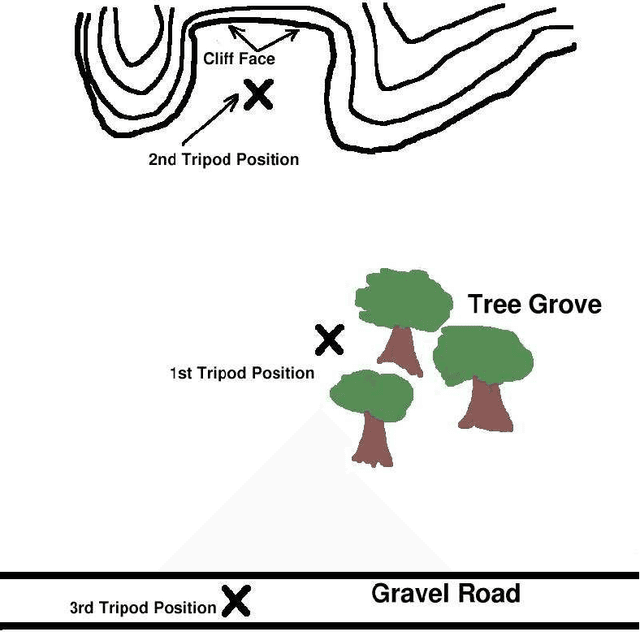
We present results from the first geological field tests of the `Cyborg Astrobiologist', which is a wearable computer and video camcorder system that we are using to test and train a computer-vision system towards having some of the autonomous decision-making capabilities of a field-geologist and field-astrobiologist. The Cyborg Astrobiologist platform has thus far been used for testing and development of these algorithms and systems: robotic acquisition of quasi-mosaics of images, real-time image segmentation, and real-time determination of interesting points in the image mosaics. The hardware and software systems function reliably, and the computer-vision algorithms are adequate for the first field tests. In addition to the proof-of-concept aspect of these field tests, the main result of these field tests is the enumeration of those issues that we can improve in the future, including: first, detection and accounting for shadows caused by 3D jagged edges in the outcrop; second, reincorporation of more sophisticated texture-analysis algorithms into the system; third, creation of hardware and software capabilities to control the camera's zoom lens in an intelligent manner; and fourth, development of algorithms for interpretation of complex geological scenery. Nonetheless, despite these technical inadequacies, this Cyborg Astrobiologist system, consisting of a camera-equipped wearable-computer and its computer-vision algorithms, has demonstrated its ability of finding genuinely interesting points in real-time in the geological scenery, and then gathering more information about these interest points in an automated manner.