 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe BARN Challenge 2023 -- Autonomous Navigation in Highly Constrained Spaces -- Inventec Team
Paper and Code
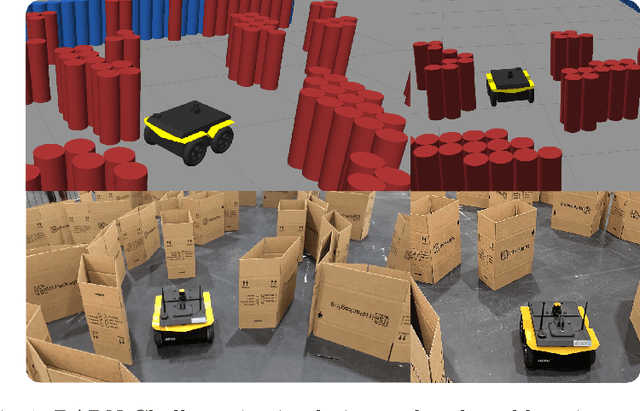
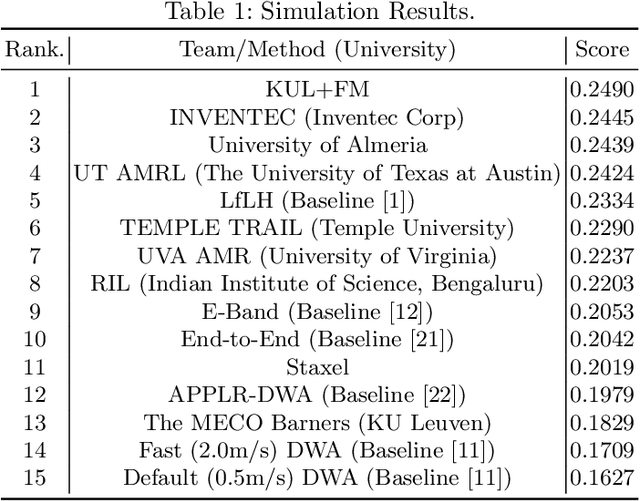

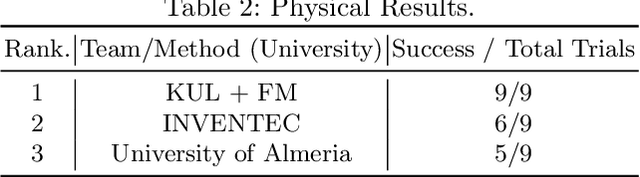
Navigation in the real-world is hard and filled with complex scenarios. The Benchmark Autonomous Robot Navigation (BARN) Challenge is a competition that focuses on highly constrained spaces. Teams compete using a standard platform in a simulation and a real-world stage, with scenarios ranging from easy to challenging. This technical report presents the system and methods employed by the Inventec Team during the BARN Challenge 2023 (https://cs.gmu.edu/~xiao/Research/BARN_Challenge/BARN_Challenge23.html). At its core, our method uses the baseline learning-based controller LfLH. We developed extensions using a finite state machine to trigger recovery behaviors, and introduced two alternatives for forward safety collision checks, based on footprint inflation and model-predictive control. Moreover, we also present a backtrack safety check based on costmap region-of-interest. Compared to the original baseline, we managed a significant increase in the navigation score, from 0.2334 to 0.2445 (4.76%). Overall, our team ranked second place both in simulation and in the real-world stage. Our code is publicly available at: (https://github.com/inventec-ai-center/inventec-team-barn-challenge-2023.git)