 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Amazing Race TM: Robot Edition
Paper and Code

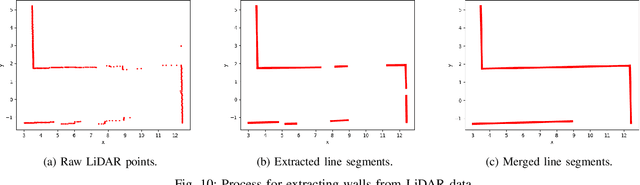
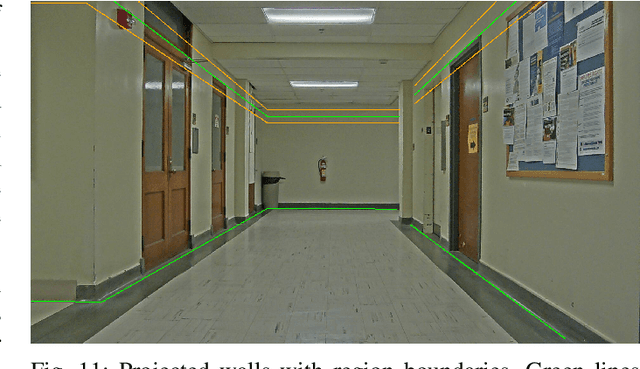
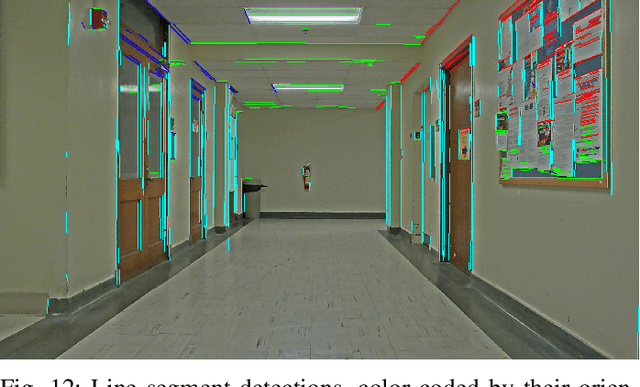
State-of-the-art natural-language-driven autonomous-navigation systems generally lack the ability to operate in real unknown environments without crutches, such as having a map of the environment in advance or requiring a strict syntactic structure for natural-language commands. Practical artificial-intelligent systems should not have to depend on such prior knowledge. To encourage effort towards this goal, we propose The Amazing Race TM: Robot Edition, a new task of finding a room in an unknown and unmodified office environment by following instructions obtained in spoken dialog from an untrained person. We present a solution that treats this challenge as a series of sub-tasks: natural-language interpretation, autonomous navigation, and semantic mapping. The solution consists of a finite-state-machine system design whose states solve these sub-tasks to complete The Amazing Race TM. Our design is deployed on a real robot and its performance is demonstrated in 52 trials on 4 floors of each of 3 different previously unseen buildings with 13 untrained volunteers.