 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeText-Based Action-Model Acquisition for Planning
Paper and Code
Feb 18, 2022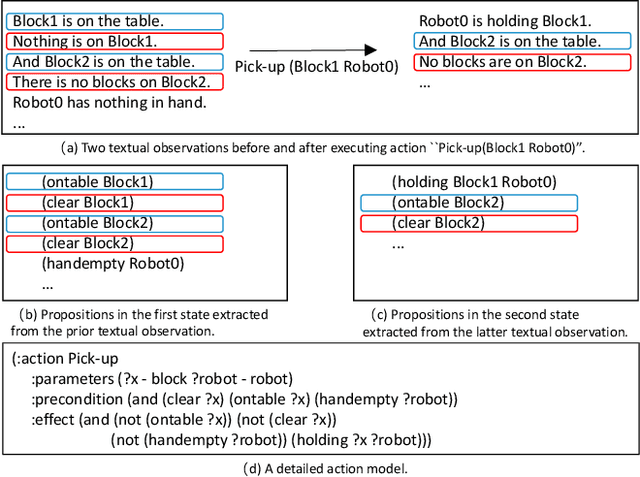
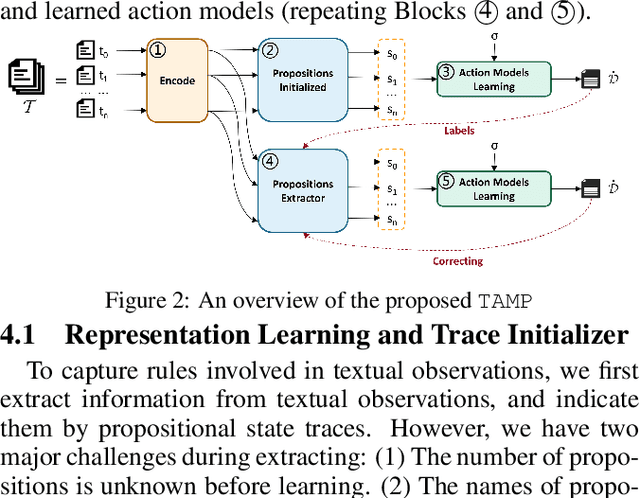

Although there have been approaches that are capable of learning action models from plan traces, there is no work on learning action models from textual observations, which is pervasive and much easier to collect from real-world applications compared to plan traces. In this paper we propose a novel approach to learning action models from natural language texts by integrating Constraint Satisfaction and Natural Language Processing techniques. Specifically, we first build a novel language model to extract plan traces from texts, and then build a set of constraints to generate action models based on the extracted plan traces. After that, we iteratively improve the language model and constraints until we achieve the convergent language model and action models. We empirically exhibit that our approach is both effective and efficient.