 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTerrain parameter estimation from proprioceptive sensing of the suspension dynamics in offroad vehicles
Paper and Code
Feb 09, 2022
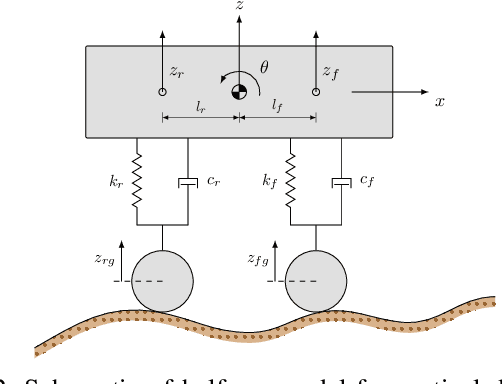


Offroad vehicle movement has to contend with uneven and uncertain terrain which present challenges to path planning and motion control for both manned and unmanned ground vehicles. Knowledge of terrain properties can allow a vehicle to adapt its control and motion planning algorithms. Terrain properties, however, can change on time scales of days or even hours, necessitating their online estimation. The kinematics and, in particular the oscillations experienced by an offroad vehicle carry a signature of the terrain properties. These terrain properties can thus be estimated from proprioceptive sensing of the vehicle dynamics with an appropriate model and estimation algorithm. In this paper, we show that knowledge of the vertical dynamics of a vehicle due to its suspension can enable faster and more accurate estimation of terrain parameters. The paper considers a five degree of freedom model that combines the well known half-car and bicycle models. We show through simulation that the sinkage exponent, a parameter that can significantly influence the wheel forces from the terrain and thus greatly impact the vehicle trajectory, can be estimated from measurements of the vehicle's linear acceleration and rotational velocity, which can be readily obtained from an onboard IMU. We show that modelling the vertical vehicle dynamics can lead to significant improvement in both the estimation of terrain parameters and the prediction of the vehicle trajectory.