 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTerminal Adaptive Guidance for Autonomous Hypersonic Strike Weapons via Reinforcement Learning
Paper and Code
Oct 16, 2021
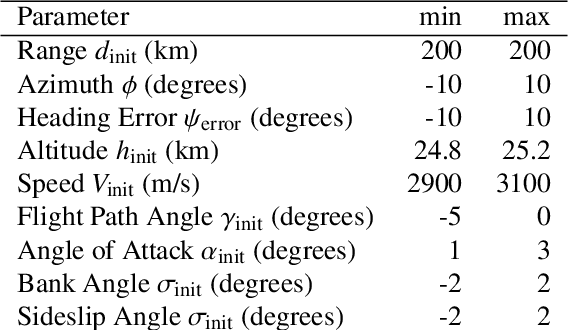
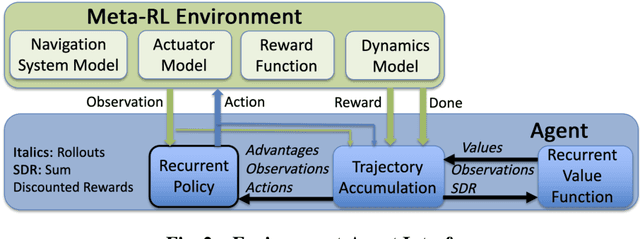
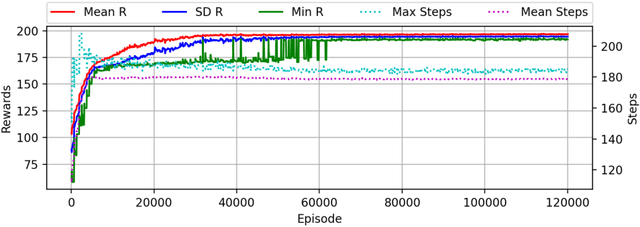
An adaptive guidance system suitable for the terminal phase trajectory of a hypersonic strike weapon is optimized using reinforcement meta learning. The guidance system maps observations directly to commanded bank angle, angle of attack, and sideslip angle rates. Importantly, the observations are directly measurable from radar seeker outputs with minimal processing. The optimization framework implements a shaping reward that minimizes the line of sight rotation rate, with a terminal reward given if the agent satisfies path constraints and meets terminal accuracy and speed criteria. We show that the guidance system can adapt to off-nominal flight conditions including perturbation of aerodynamic coefficient parameters, actuator failure scenarios, sensor scale factor errors, and actuator lag, while satisfying heating rate, dynamic pressure, and load path constraints, as well as a minimum impact speed constraint. We demonstrate precision strike capability against a maneuvering ground target and the ability to divert to a new target, the latter being important to maximize strike effectiveness for a group of hypersonic strike weapons. Moreover, we demonstrate a threat evasion strategy against interceptors with limited midcourse correction capability, where the hypersonic strike weapon implements multiple diverts to alternate targets, with the last divert to the actual target. Finally, we include preliminary results for an integrated guidance and control system in a six degrees-of-freedom environment.