 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTemporally-Transferable Perturbations: Efficient, One-Shot Adversarial Attacks for Online Visual Object Trackers
Paper and Code
Dec 30, 2020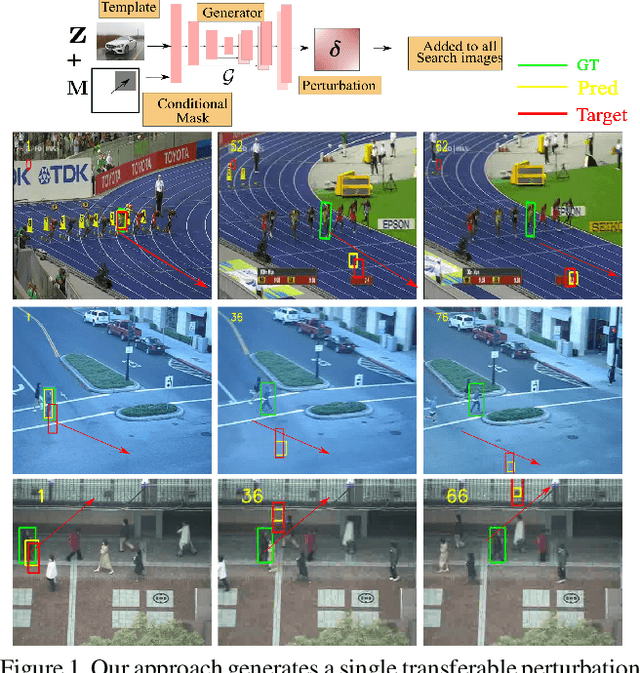
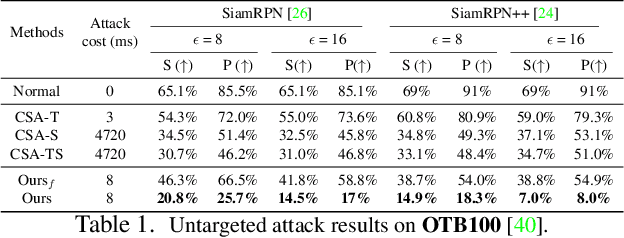
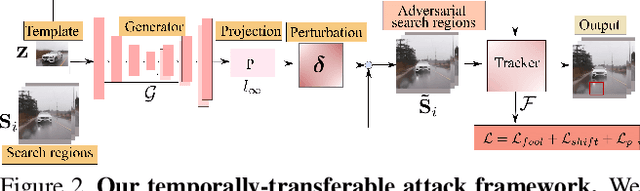
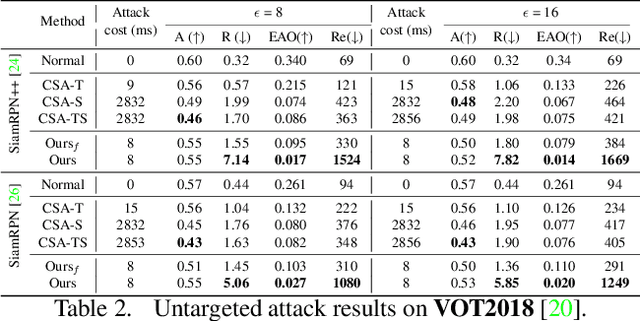
In recent years, the trackers based on Siamese networks have emerged as highly effective and efficient for visual object tracking (VOT). While these methods were shown to be vulnerable to adversarial attacks, as most deep networks for visual recognition tasks, the existing attacks for VOT trackers all require perturbing the search region of every input frame to be effective, which comes at a non-negligible cost, considering that VOT is a real-time task. In this paper, we propose a framework to generate a single temporally transferable adversarial perturbation from the object template image only. This perturbation can then be added to every search image, which comes at virtually no cost, and still, successfully fool the tracker. Our experiments evidence that our approach outperforms the state-of-the-art attacks on the standard VOT benchmarks in the untargeted scenario. Furthermore, we show that our formalism naturally extends to targeted attacks that force the tracker to follow any given trajectory by precomputing diverse directional perturbations.