 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTemporal Convolutions for Multi-Step Quadrotor Motion Prediction
Paper and Code
Oct 08, 2021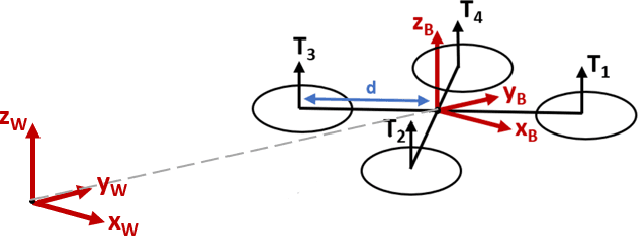


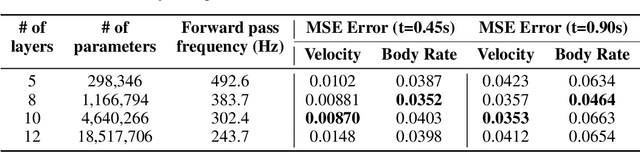
Model-based control methods for robotic systems such as quadrotors, autonomous driving vehicles and flexible manipulators require motion models that generate accurate predictions of complex nonlinear system dynamics over long periods of time. Temporal Convolutional Networks (TCNs) can be adapted to this challenge by formulating multi-step prediction as a sequence-to-sequence modeling problem. We present End2End-TCN: a fully convolutional architecture that integrates future control inputs to compute multi-step motion predictions in one forward pass. We demonstrate the approach with a thorough analysis of TCN performance for the quadrotor modeling task, which includes an investigation of scaling effects and ablation studies. Ultimately, End2End-TCN provides 55% error reduction over the state of the art in multi-step prediction on an aggressive indoor quadrotor flight dataset. The model yields accurate predictions across 90 timestep horizons over a 900 ms interval.