Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTeaching Perception
Paper and Code
Nov 21, 2019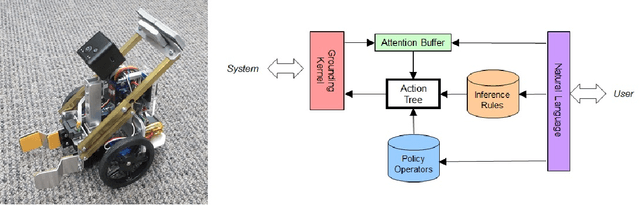
The visual world is very rich and generally too complex to perceive in its entirety. Yet only certain features are typically required to adequately perform some task in a given situation. Rather than hardwire-in decisions about when and what to sense, this paper describes a robotic system whose behavioral policy can be set by verbal instructions it receives. These capabilities are demonstrated in an associated video showing the fully implemented system guiding the perception of a physical robot in simple scenario. The structure and functioning of the underlying natural language based symbolic reasoning system is also discussed.
* arXiv admin note: text overlap with arXiv:1911.09782
View paper on