 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTask planning and explanation with virtual actions
Paper and Code
Jan 10, 2022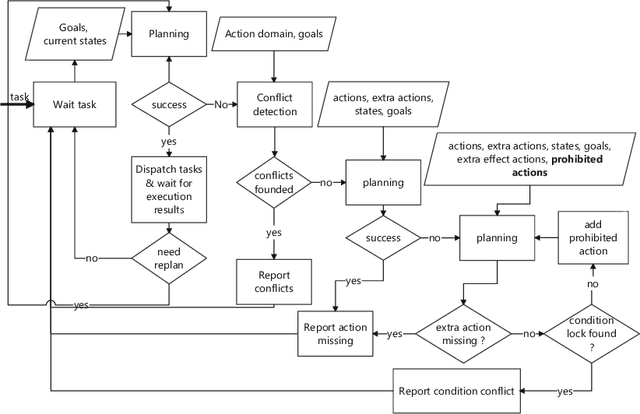
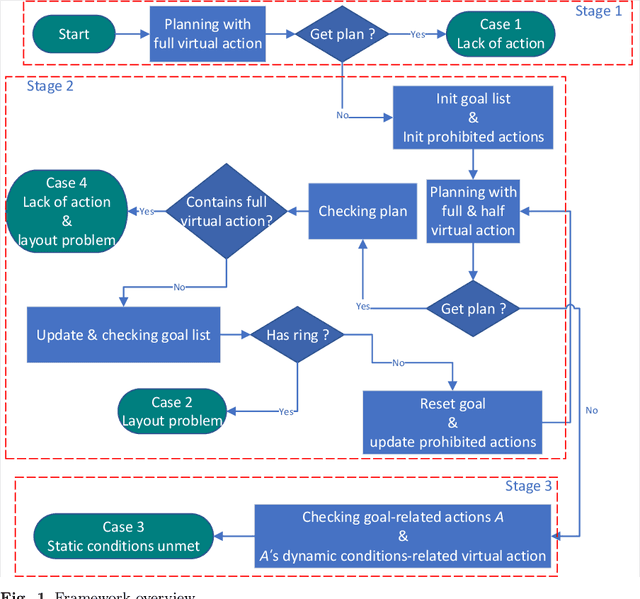
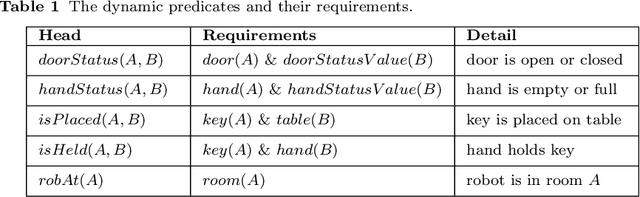
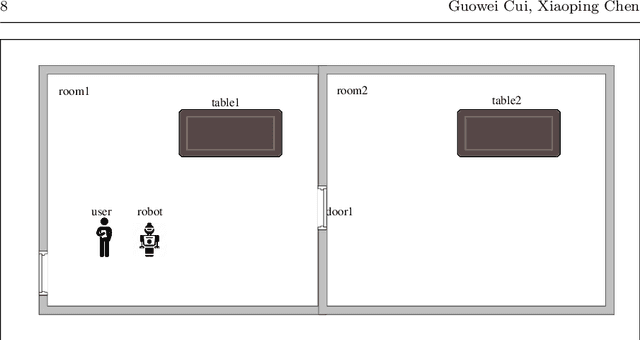
One of the challenges of task planning is to find out what causes the planning failure and how to handle the failure intelligently. This paper shows how to achieve this. The idea is inspired by the connected graph: each verticle represents a set of compatible \textit{states}, and each edge represents an \textit{action}. For any given initial states and goals, we construct virtual actions to ensure that we always get a plan via task planning. This paper shows how to introduce virtual action to extend action models to make the graph to be connected: i) explicitly defines static predicate (type, permanent properties, etc) or dynamic predicate (state); ii) constructs a full virtual action or a semi-virtual action for each state; iii) finds the cause of the planning failure through a progressive planning approach. The implementation was evaluated in three typical scenarios.