 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTask-Focused Few-Shot Object Detection for Robot Manipulation
Paper and Code
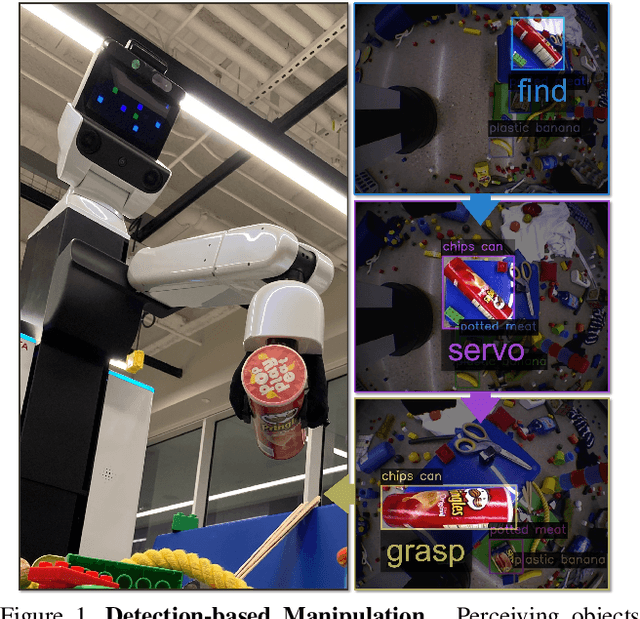
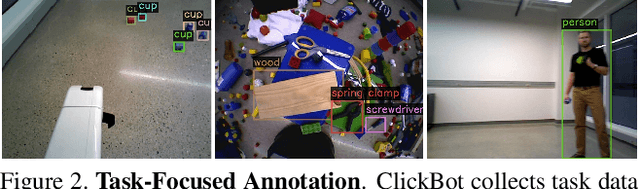
This paper addresses the problem of mobile robot manipulation of novel objects via detection. Our approach uses vision and control as complementary functions that learn from real-world tasks. We develop a manipulation method based solely on detection then introduce task-focused few-shot object detection to learn new objects and settings. The current paradigm for few-shot object detection uses existing annotated examples. In contrast, we extend this paradigm by using active data collection and annotation selection that improves performance for specific downstream tasks (e.g., depth estimation and grasping). In experiments for our interactive approach to few-shot learning, we train a robot to manipulate objects directly from detection (ClickBot). ClickBot learns visual servo control from a single click of annotation, grasps novel objects in clutter and other settings, and achieves state-of-the-art results on an existing visual servo control and depth estimation benchmark. Finally, we establish a task-focused few-shot object detection benchmark to support future research: https://github.com/griffbr/TFOD.