 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTask-driven Modular Co-design of Vehicle Control Systems
Paper and Code
Mar 30, 2022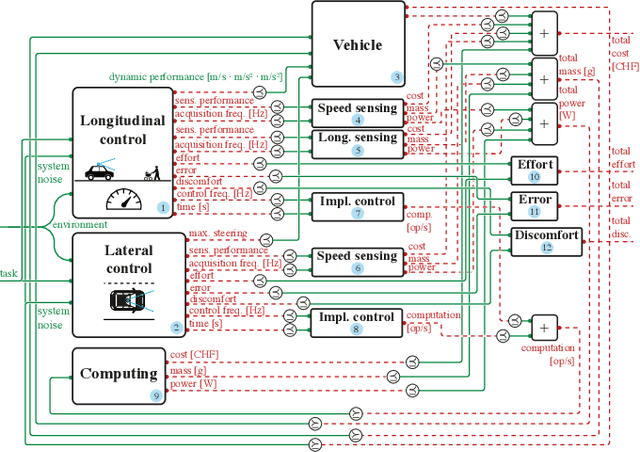
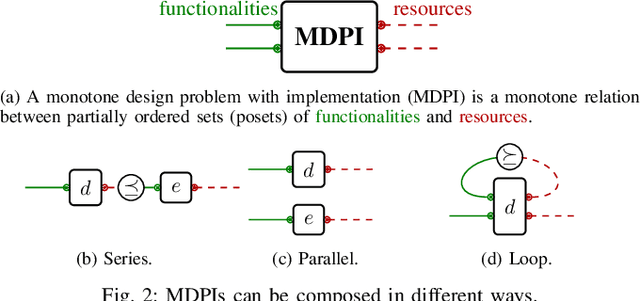
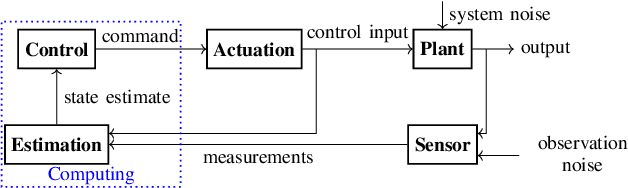
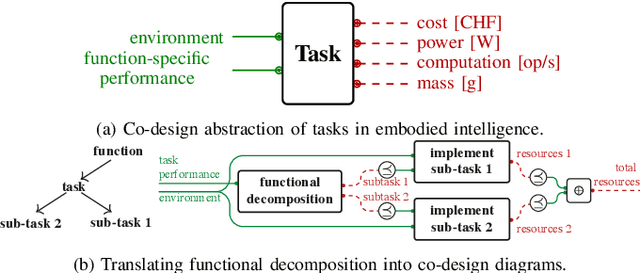
When designing autonomous systems, we need to consider multiple trade-offs at various abstraction levels, and the choices of single (hardware and software) components need to be studied jointly. In this work we consider the problem of designing the control algorithm as well as the platform on which it is executed. In particular, we focus on vehicle control systems, and formalize state-of-the-art control schemes as monotone feasibility relations. We then show how, leveraging a monotone theory of co-design, we can study the embedding of control synthesis problems into the task-driven co-design problem of a robotic platform. The properties of the proposed approach are illustrated by considering urban driving scenarios. We show how, given a particular task, we can efficiently compute Pareto optimal design solutions.