 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTask-Based Information Compression for Multi-Agent Communication Problems with Channel Rate Constraints
Paper and Code
May 28, 2020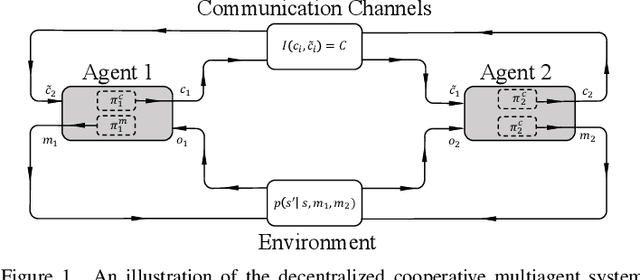
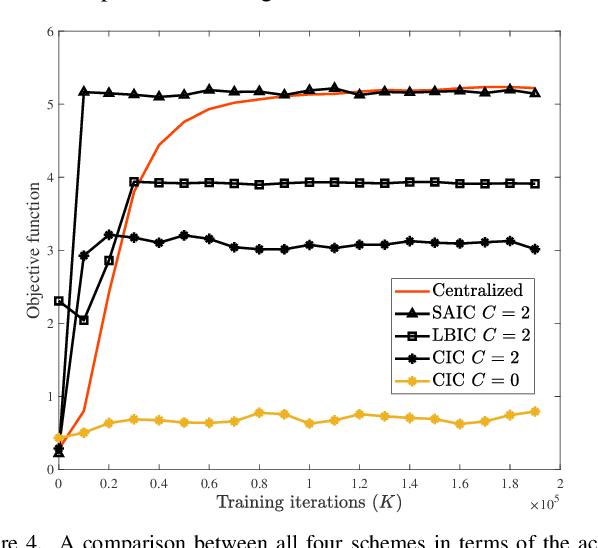
A collaborative task is assigned to a multiagent system (MAS) in which agents are allowed to communicate. The MAS runs over an underlying Markov decision process and its task is to maximize the averaged sum of discounted one-stage rewards. Although knowing the global state of the environment is necessary for the optimal action selection of the MAS, agents are limited to individual observations. The inter-agent communication can tackle the issue of local observability, however, the limited rate of the inter-agent communication prevents the agent from acquiring the precise global state information. To overcome this challenge, agents need to communicate their observations in a compact way such that the MAS compromises the minimum possible sum of rewards. We show that this problem is equivalent to a form of rate-distortion problem which we call the task-based information compression. We introduce two schemes for task-based information compression (i) Learning-based information compression (LBIC) which leverages reinforcement learning to compactly represent the observation space of the agents, and (ii) State aggregation for information compression (SAIC), for which a state aggregation algorithm is analytically designed. The SAIC is shown, conditionally, to be capable of achieving the optimal performance in terms of the attained sum of discounted rewards. The proposed algorithms are applied to a rendezvous problem and their performance is compared with two benchmarks; (i) conventional source coding algorithms and the (ii) centralized multiagent control using reinforcement learning. Numerical experiments confirm the superiority of the proposed algorithms.