 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTactile-ViewGCN: Learning Shape Descriptor from Tactile Data using Graph Convolutional Network
Paper and Code
Mar 12, 2022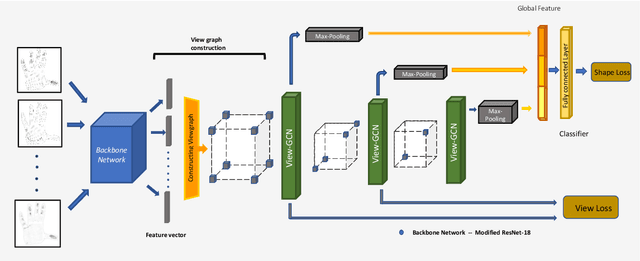
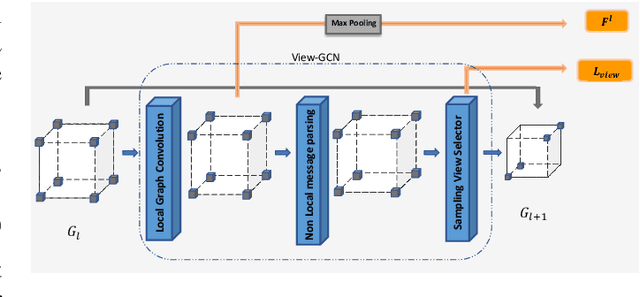
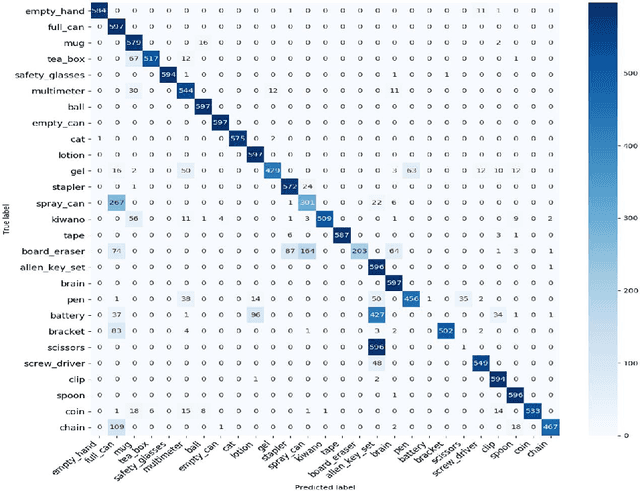
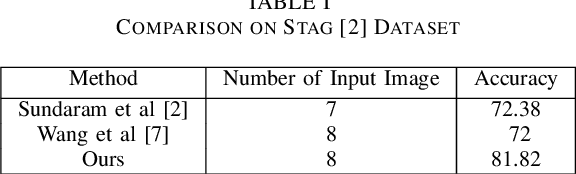
For humans, our "senses of touch" have always been necessary for our ability to precisely and efficiently manipulate objects of all shapes in any environment, but until recently, not many works have been done to fully understand haptic feedback. This work proposed a novel method for getting a better shape descriptor than existing methods for classifying an object from multiple tactile data collected from a tactile glove. It focuses on improving previous works on object classification using tactile data. The major problem for object classification from multiple tactile data is to find a good way to aggregate features extracted from multiple tactile images. We propose a novel method, dubbed as Tactile-ViewGCN, that hierarchically aggregate tactile features considering relations among different features by using Graph Convolutional Network. Our model outperforms previous methods on the STAG dataset with an accuracy of 81.82%.