 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeT-CorresNet: Template Guided 3D Point Cloud Completion with Correspondence Pooling Query Generation Strategy
Paper and Code
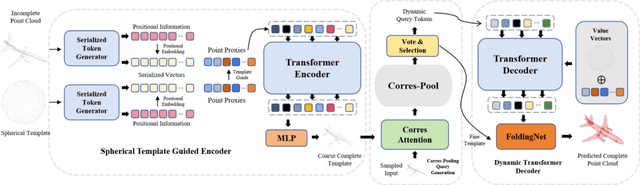

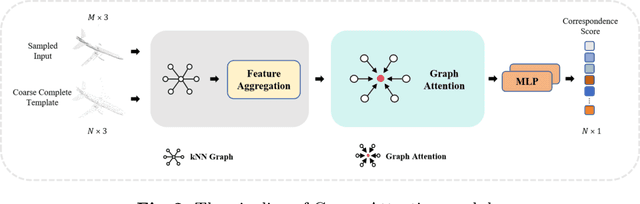

Point clouds are commonly used in various practical applications such as autonomous driving and the manufacturing industry. However, these point clouds often suffer from incompleteness due to limited perspectives, scanner resolution and occlusion. Therefore the prediction of missing parts performs a crucial task. In this paper, we propose a novel method for point cloud completion. We utilize a spherical template to guide the generation of the coarse complete template and generate the dynamic query tokens through a correspondence pooling (Corres-Pooling) query generator. Specifically, we first generate the coarse complete template by embedding a Gaussian spherical template into the partial input and transforming the template to best match the input. Then we use the Corres-Pooling query generator to refine the coarse template and generate dynamic query tokens which could be used to predict the complete point proxies. Finally, we generate the complete point cloud with a FoldingNet following the coarse-to-fine paradigm, according to the fine template and the predicted point proxies. Experimental results demonstrate that our T-CorresNet outperforms the state-of-the-art methods on several benchmarks. Our Codes are available at https://github.com/df-boy/T-CorresNet.