Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSymmetries in observer design: review of some recent results and applications to EKF-based SLAM
Paper and Code
May 11, 2011
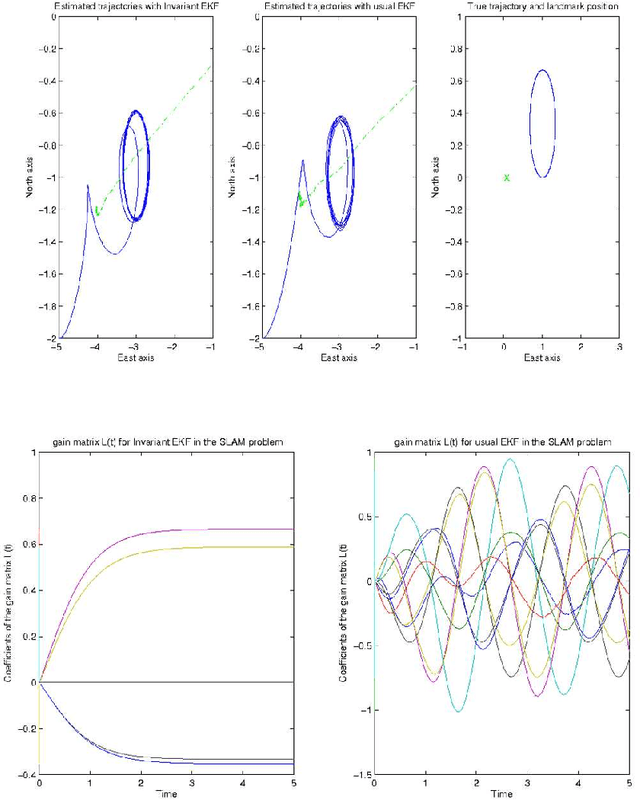
In this paper, we first review the theory of symmetry-preserving observers and we mention some recent results. Then, we apply the theory to Extended Kalman Filter-based Simultaneous Localization and Mapping (EKF SLAM). It allows to derive a new (symmetry-preserving) Extended Kalman Filter for the non-linear SLAM problem that possesses convergence properties. We also prove a special choice of the gains ensures global exponential convergence.
* This paper accompanies a presentation to be given at Eighth
International Workshop on Robot Motion and Control (RoMoCo'11)
View paper on