Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSymbolic LTLf Best-Effort Synthesis
Paper and Code
Aug 29, 2023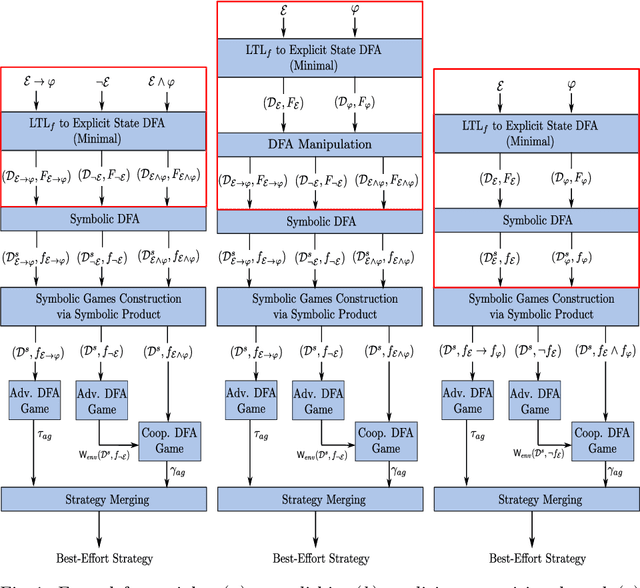
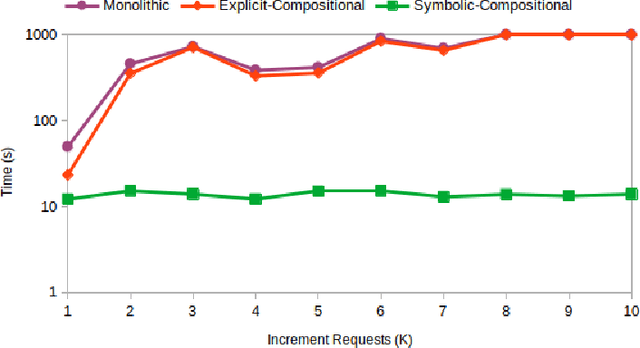
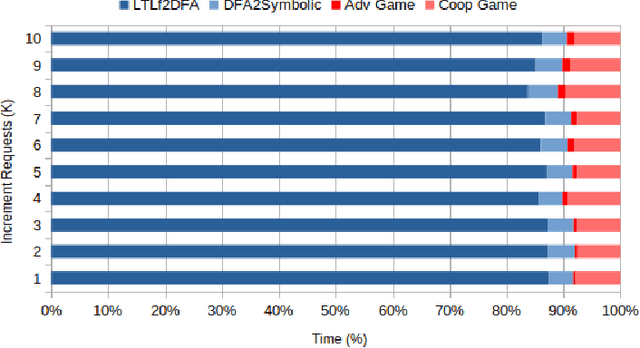
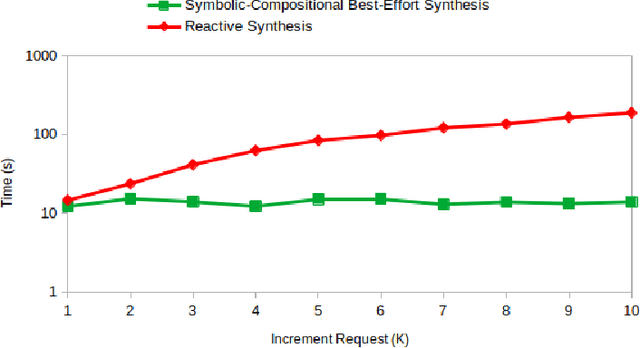
We consider an agent acting to fulfil tasks in a nondeterministic environment. When a strategy that fulfills the task regardless of how the environment acts does not exist, the agent should at least avoid adopting strategies that prevent from fulfilling its task. Best-effort synthesis captures this intuition. In this paper, we devise and compare various symbolic approaches for best-effort synthesis in Linear Temporal Logic on finite traces (LTLf). These approaches are based on the same basic components, however they change in how these components are combined, and this has a significant impact on the performance of the approaches as confirmed by our empirical evaluations.
* To appear at EUMAS2023
View paper on