 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSurvey on Semantic Stereo Matching / Semantic Depth Estimation
Paper and Code
Sep 21, 2021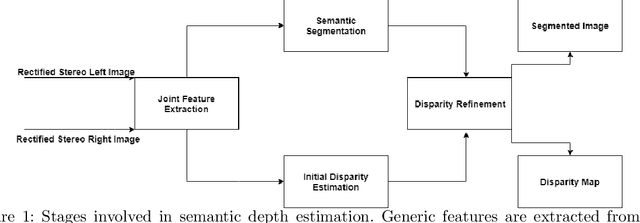

Stereo matching is one of the widely used techniques for inferring depth from stereo images owing to its robustness and speed. It has become one of the major topics of research since it finds its applications in autonomous driving, robotic navigation, 3D reconstruction, and many other fields. Finding pixel correspondences in non-textured, occluded and reflective areas is the major challenge in stereo matching. Recent developments have shown that semantic cues from image segmentation can be used to improve the results of stereo matching. Many deep neural network architectures have been proposed to leverage the advantages of semantic segmentation in stereo matching. This paper aims to give a comparison among the state of art networks both in terms of accuracy and in terms of speed which are of higher importance in real-time applications.