 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSurface Disinfection using Ultraviolet Lightwith a Mobile Manipulation Robot
Paper and Code
Apr 21, 2021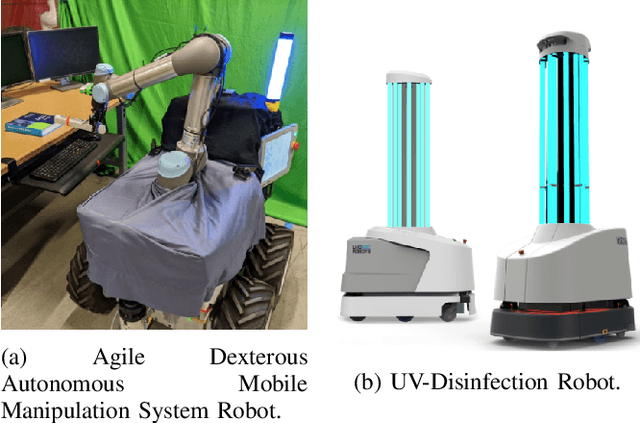
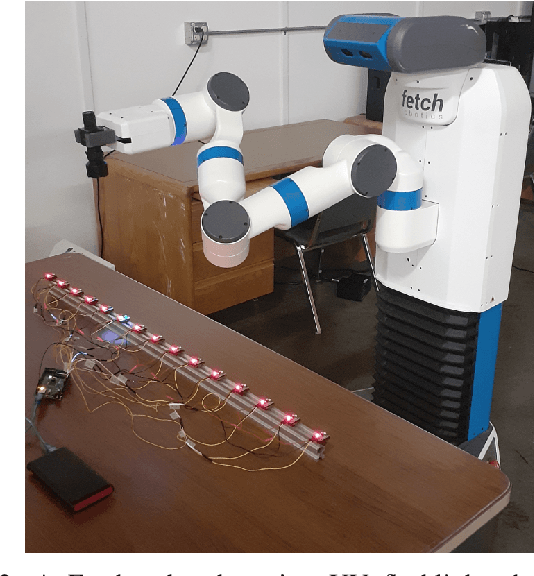

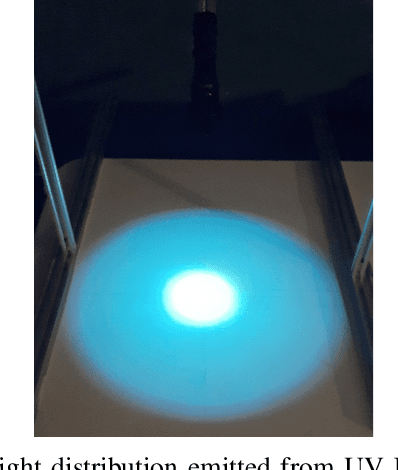
Robots are being increasingly used in the fight against highly-infectious diseases such as Ebola, MERS, and SARS-COV-2. Many of the robots that are being used employ ultraviolet lights mounted on a mobile base to inactivate the pathogens. However, these lights are often mounted in a fixed configuration and do not provide adequate decontamination of horizontal surfaces, which can be a major source of cross-contamination. In the paper, we describe the design, implementation, and testing of an Ultraviolet Germicidal Irradiation (UVGI) system implemented on a mobile manipulation robot. A human supervisor designates a surface for disinfection, the robot autonomously plans and executes an end-effector trajectory to disinfect the surface to the required certainty, and then displays the results for the human supervisor to verify. We also provide some background information on UVGI and describe how we constructed and validated mathematical models of Ultraviolet (UV) radiation propagation and accumulation. Finally, we describe our implementation on a Fetch mobile manipulation platform, and discuss how the practicalities of implementation on a real robot affect our models.