 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSub-pixel accuracy edge fitting by means of B-spline
Paper and Code
Mar 31, 2016
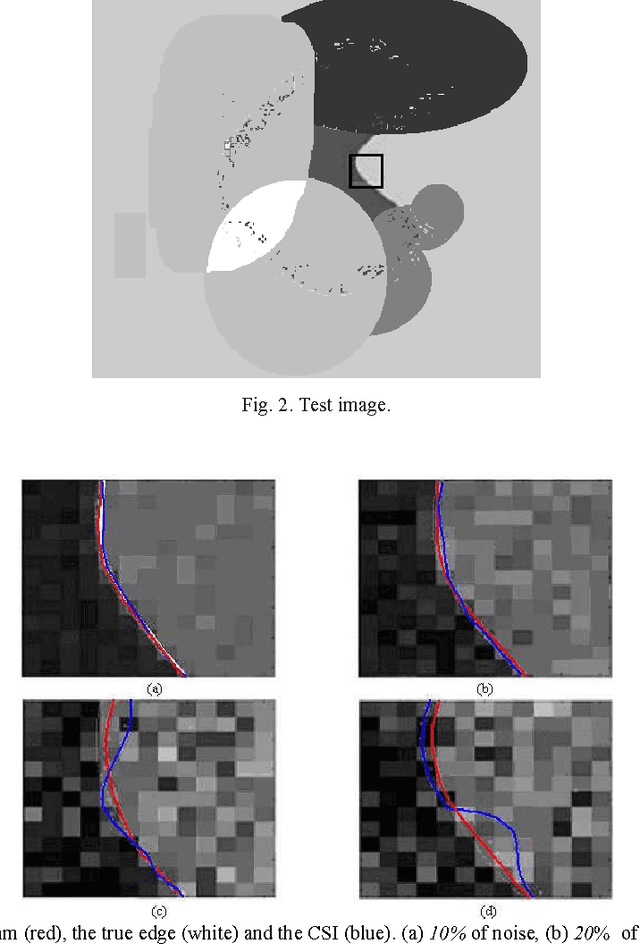
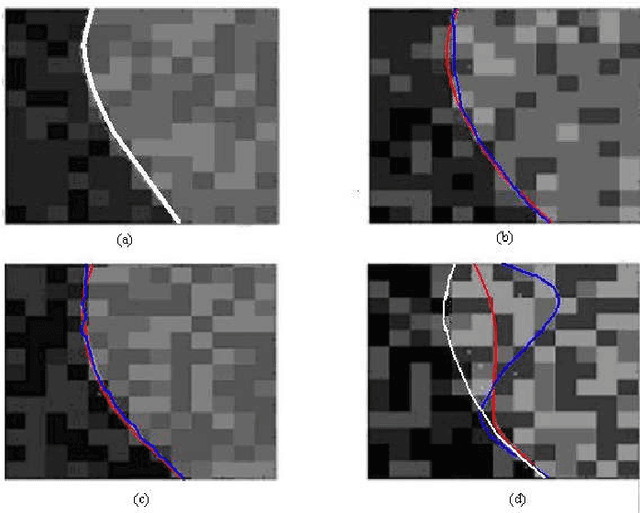
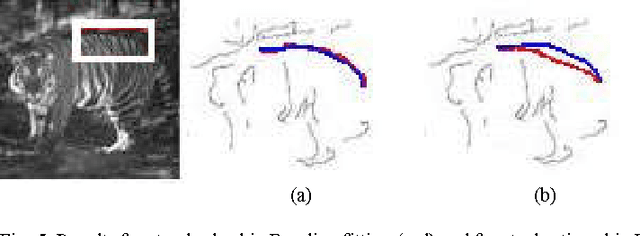
Local perturbations around contours strongly disturb the final result of computer vision tasks. It is common to introduce a priori information in the estimation process. Improvement can be achieved via a deformable model such as the snake model. In recent works, the deformable contour is modeled by means of B-spline snakes which allows local control, concise representation, and the use of fewer parameters. The estimation of the sub-pixel edges using a global B-spline model relies on the contour global determination according to a maximum likelihood framework and using the observed data likelihood. This procedure guarantees that the noisiest data will be filtered out. The data likelihood is computed as a consequence of the observation model which includes both orientation and position information. Comparative experiments of this algorithm and the classical spline interpolation have shown that the proposed algorithm outperforms the classical approach for Gaussian and Salt & Pepper noise.