 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStudy of MRI-compatible Notched Plastic Ultrasonic Stator with FEM Simulation and Holography Validation
Paper and Code
Aug 16, 2024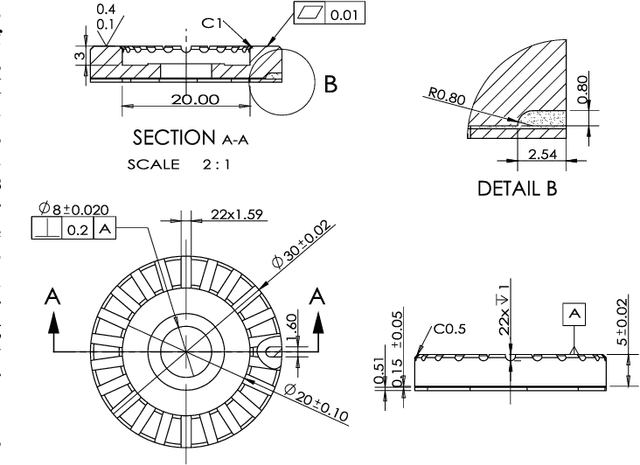



Intra-operative image guidance using magnetic resonance imaging (MRI) can significantly enhance the precision of surgical procedures, such as deep brain tumor ablation. However, the powerful magnetic fields and limited space within an MRI scanner require the use of robotic devices to aid surgeons. Piezoelectric motors are commonly utilized to drive these robots, with piezoelectric ultrasonic motors being particularly notable. These motors consist of a piezoelectric ring stator that is bonded to a rotor through frictional coupling. When the stator is excited at specific frequencies, it generates distinctive mode shapes with surface waves that exhibit both in-plane and out-of-plane displacement, leading to the rotation of the rotor. In this study, we continue our previous work and refine the motor design and performance, we combine finite element modeling (FEM) with stroboscopic and time-averaged digital holography to validate a further plastic-based ultrasonic motor with better rotary performance.