Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStructure from Motion on a Sphere
Paper and Code
Sep 05, 2016

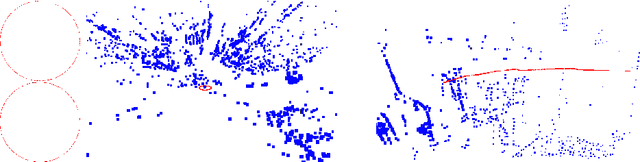
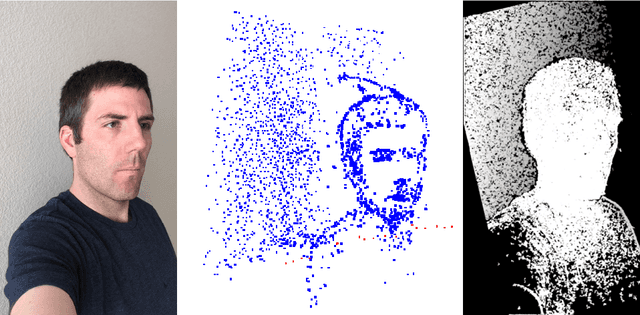
We describe a special case of structure from motion where the camera rotates on a sphere. The camera's optical axis lies perpendicular to the sphere's surface. In this case, the camera's pose is minimally represented by three rotation parameters. From analysis of the epipolar geometry we derive a novel and efficient solution for the essential matrix relating two images, requiring only three point correspondences in the minimal case. We apply this solver in a structure-from-motion pipeline that aggregates pairwise relations by rotation averaging followed by bundle adjustment with an inverse depth parameterization. Our methods enable scene modeling with an outward-facing camera and object scanning with an inward-facing camera.
* in European Conference on Computer Vision (ECCV) 2016
View paper on