 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStrengthened SDP Verification of Neural Network Robustness via Non-Convex Cuts
Paper and Code
Oct 16, 2020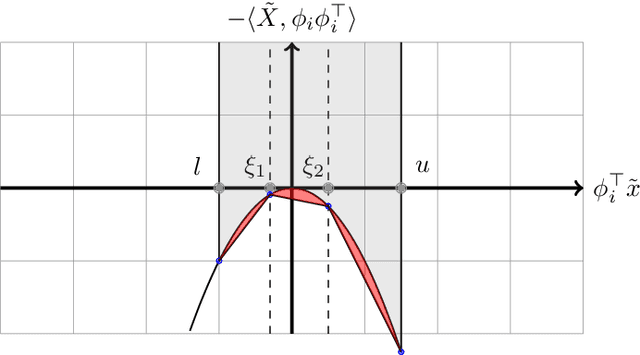
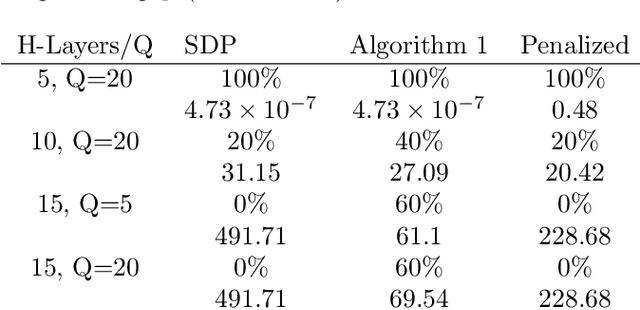
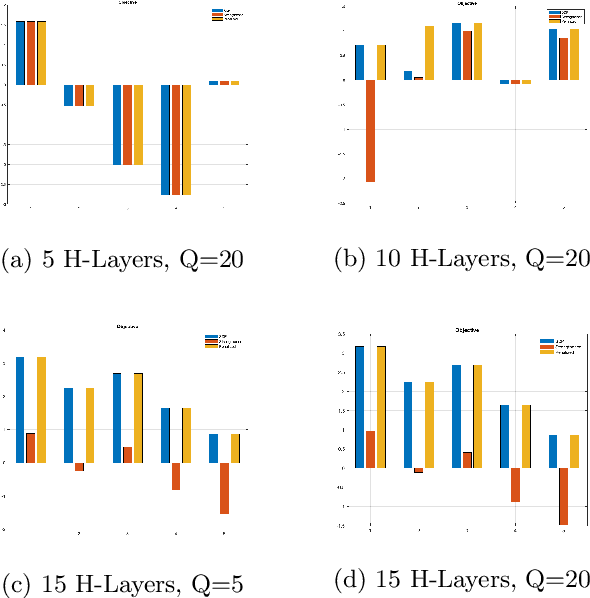
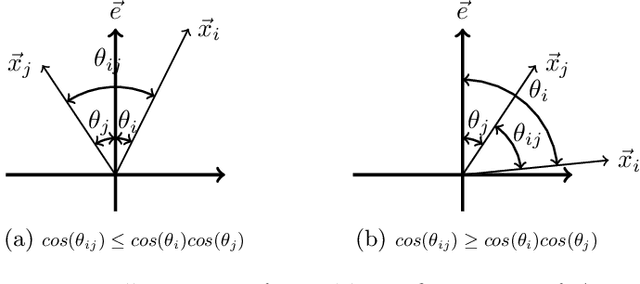
There have been major advances on the design of neural networks, but still they cannot be applied to many safety-critical systems due to the lack of efficient computational techniques to analyze and certify their robustness. Recently, various methods based on convex optimization have been proposed to address this issue. In particular, the semidefinite programming (SDP) approach has gained popularity in convexifying the robustness analysis problem. Since this approach is prone to a large relaxation gap, this paper develops a new technique to reduce the gap by adding non-convex cuts via disjunctive programming. The proposed method amounts to a sequential SDP technique. We analyze the performance of this method both theoretically and empirically, and show that it bridges the gap as the number of cuts increases.