 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStrategic Control of Proximity Relationships in Heterogeneous Search and Rescue Teams
Paper and Code
Dec 17, 2013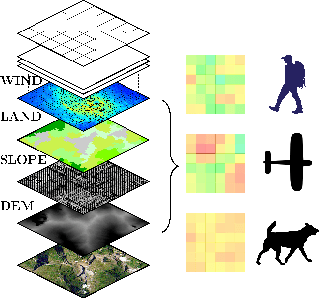
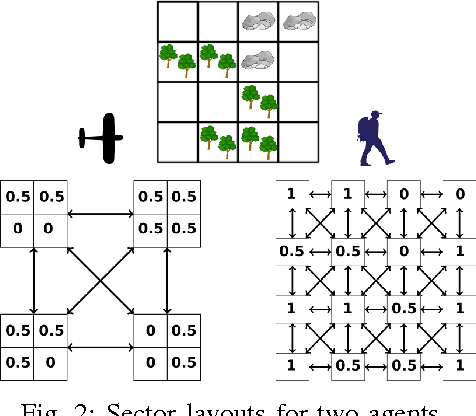
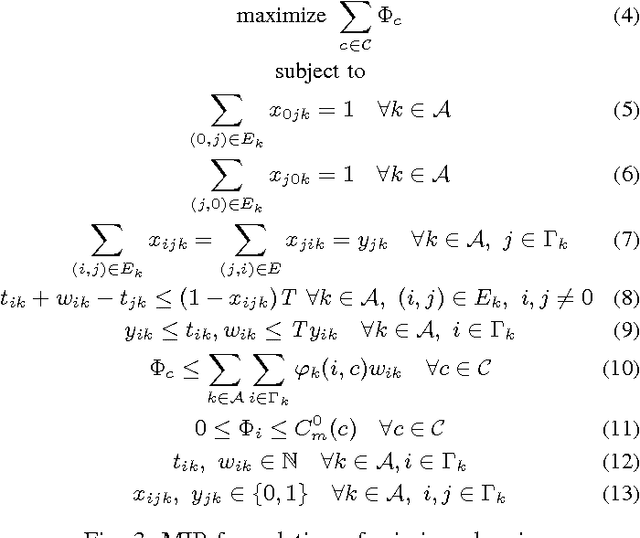
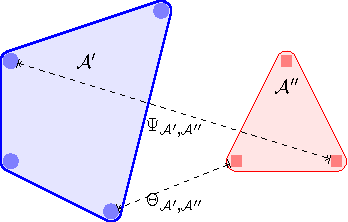
In the context of search and rescue, we consider the problem of mission planning for heterogeneous teams that can include human, robotic, and animal agents. The problem is tackled using a mixed integer mathematical programming formulation that jointly determines the path and the activity scheduling of each agent in the team. Based on the mathematical formulation, we propose the use of soft constraints and penalties that allow the flexible strategic control of spatio-temporal relations among the search trajectories of the agents. In this way, we can enable the mission planner to obtain solutions that maximize the area coverage and, at the same time, control the spatial proximity among the agents (e.g., to minimize mutual task interference, or to promote local cooperation and data sharing). Through simulation experiments, we show the application of the strategic framework considering a number of scenarios of interest for real-world search and rescue missions.