 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeState space representations of the Roesser type for convolutional layers
Paper and Code
Mar 18, 2024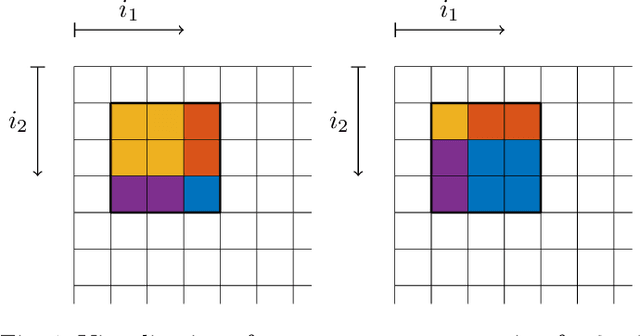
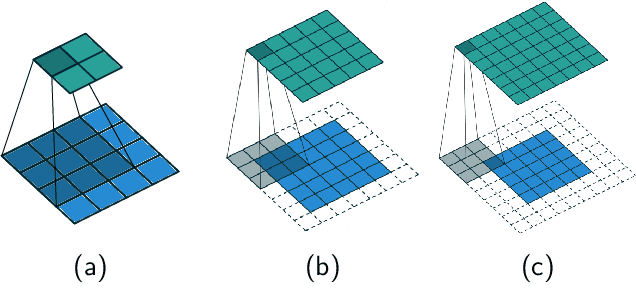
From the perspective of control theory, convolutional layers (of neural networks) are 2-D (or N-D) linear time-invariant dynamical systems. The usual representation of convolutional layers by the convolution kernel corresponds to the representation of a dynamical system by its impulse response. However, many analysis tools from control theory, e.g., involving linear matrix inequalities, require a state space representation. For this reason, we explicitly provide a state space representation of the Roesser type for 2-D convolutional layers with $c_\mathrm{in}r_1 + c_\mathrm{out}r_2$ states, where $c_\mathrm{in}$/$c_\mathrm{out}$ is the number of input/output channels of the layer and $r_1$/$r_2$ characterizes the width/length of the convolution kernel. This representation is shown to be minimal for $c_\mathrm{in} = c_\mathrm{out}$. We further construct state space representations for dilated, strided, and N-D convolutions.