 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpatio-Temporal Look-Ahead Trajectory Prediction using Memory Neural Network
Paper and Code
Feb 24, 2021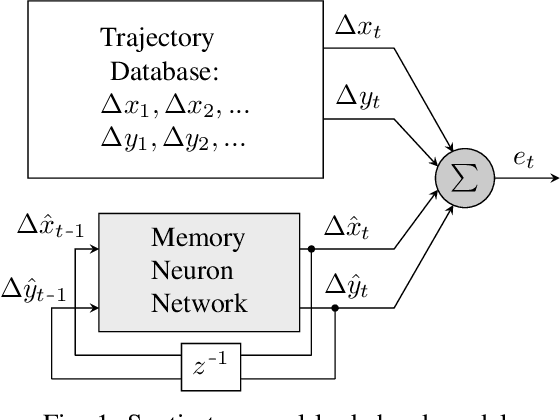

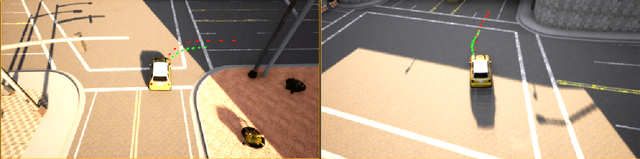
Prognostication of vehicle trajectories in unknown environments is intrinsically a challenging and difficult problem to solve. The behavior of such vehicles is highly influenced by surrounding traffic, road conditions, and rogue participants present in the environment. Moreover, the presence of pedestrians, traffic lights, stop signs, etc., makes it much harder to infer the behavior of various traffic agents. This paper attempts to solve the problem of Spatio-temporal look-ahead trajectory prediction using a novel recurrent neural network called the Memory Neuron Network. The Memory Neuron Network (MNN) attempts to capture the input-output relationship between the past positions and the future positions of the traffic agents. The proposed model is computationally less intensive and has a simple architecture as compared to other deep learning models that utilize LSTMs and GRUs. It is then evaluated on the publicly available NGSIM dataset and its performance is compared with several state-of-art algorithms. Additionally, the performance is also evaluated on a custom synthetic dataset generated from the CARLA simulator. It is seen that the proposed model outperforms the existing state-of-art algorithms. Finally, the model is integrated with the CARLA simulator to test its robustness in real-time traffic scenarios.