 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSparse Coral Classification Using Deep Convolutional Neural Networks
Paper and Code
Nov 29, 2015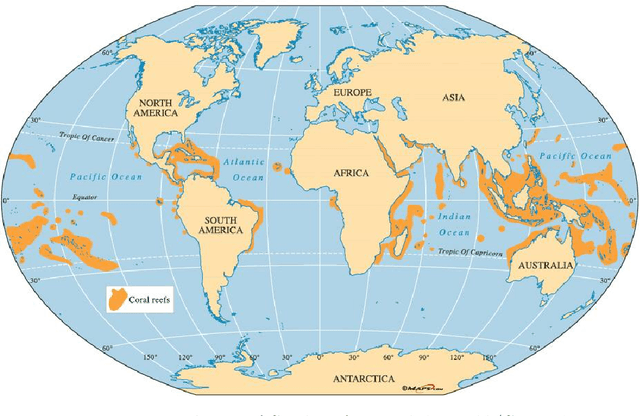


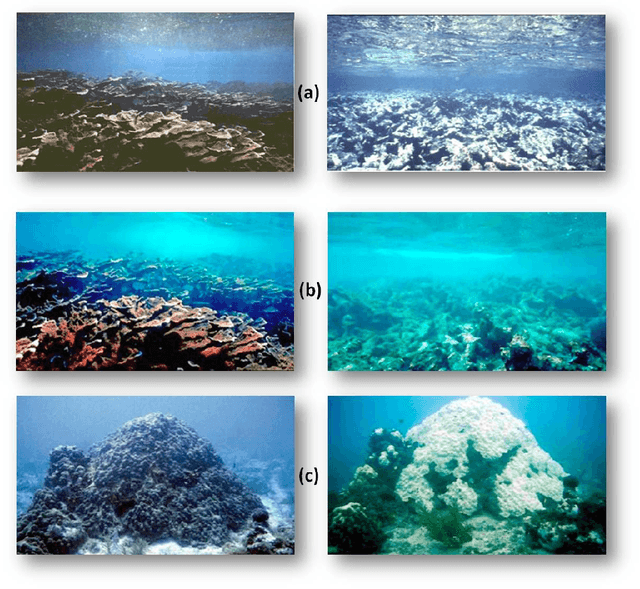
Autonomous repair of deep-sea coral reefs is a recent proposed idea to support the oceans ecosystem in which is vital for commercial fishing, tourism and other species. This idea can be operated through using many small autonomous underwater vehicles (AUVs) and swarm intelligence techniques to locate and replace chunks of coral which have been broken off, thus enabling re-growth and maintaining the habitat. The aim of this project is developing machine vision algorithms to enable an underwater robot to locate a coral reef and a chunk of coral on the seabed and prompt the robot to pick it up. Although there is no literature on this particular problem, related work on fish counting may give some insight into the problem. The technical challenges are principally due to the potential lack of clarity of the water and platform stabilization as well as spurious artifacts (rocks, fish, and crabs). We present an efficient sparse classification for coral species using supervised deep learning method called Convolutional Neural Networks (CNNs). We compute Weber Local Descriptor (WLD), Phase Congruency (PC), and Zero Component Analysis (ZCA) Whitening to extract shape and texture feature descriptors, which are employed to be supplementary channels (feature-based maps) besides basic spatial color channels (spatial-based maps) of coral input image, we also experiment state-of-art preprocessing underwater algorithms for image enhancement and color normalization and color conversion adjustment. Our proposed coral classification method is developed under MATLAB platform, and evaluated by two different coral datasets (University of California San Diego's Moorea Labeled Corals, and Heriot-Watt University's Atlantic Deep Sea).