Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoil Sample Search in Partially Observable Environments
Paper and Code
Aug 02, 2024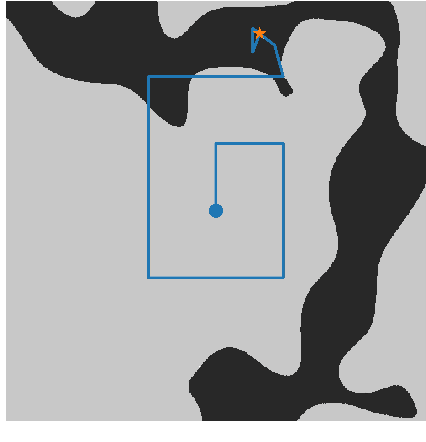
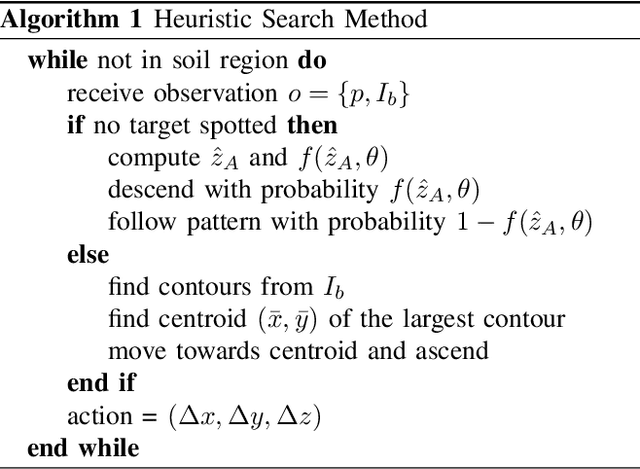
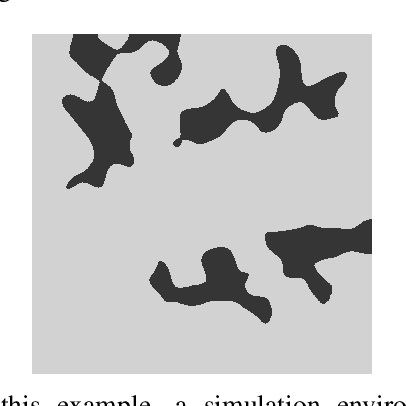
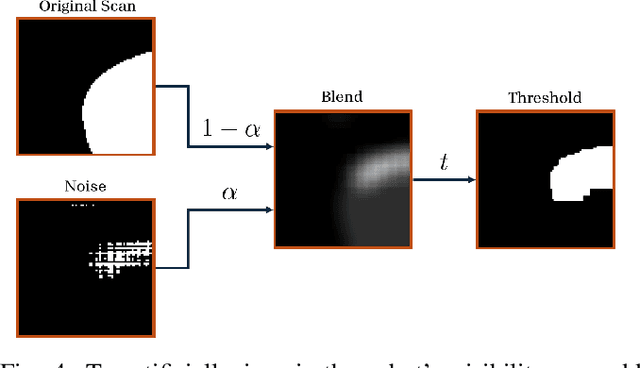
To work in unknown outdoor environments, autonomous sampling machines need the ability to target samples despite limited visibility and robotic arm reach distance. We design a heuristic guided search method to speed up the search process and more efficiently localize the approximate center of soil regions. Through simulation experiments, we assess the effectiveness of the proposed algorithm and discover superior performance in terms of speed, distance traveled, and success rate compared to naive baselines.
View paper on