 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoft Gripping System for Space Exploration Legged Robots
Paper and Code
Nov 08, 2024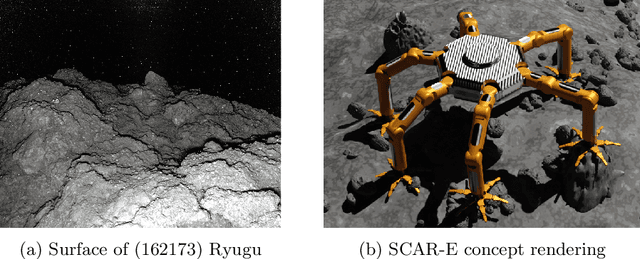
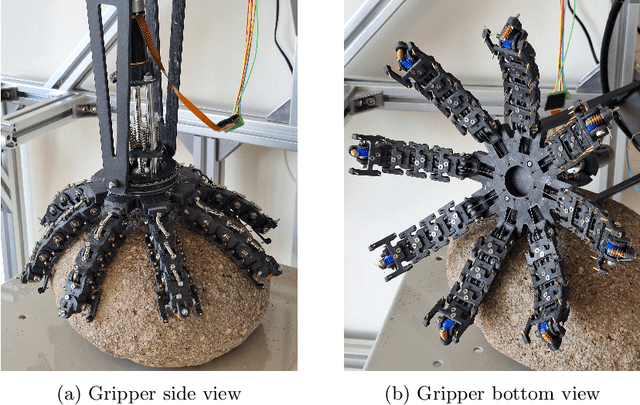
Although wheeled robots have been predominant for planetary exploration, their geometry limits their capabilities when traveling over steep slopes, through rocky terrains, and in microgravity. Legged robots equipped with grippers are a viable alternative to overcome these obstacles. This paper proposes a gripping system that can provide legged space-explorer robots a reliable anchor on uneven rocky terrain. This gripper provides the benefits of soft gripping technology by using segmented tendon-driven fingers to adapt to the target shape, and creates a strong adhesion to rocky surfaces with the help of microspines. The gripping performances are showcased, and multiple experiments demonstrate the impact of the pulling angle, target shape, spine configuration, and actuation power on the performances. The results show that the proposed gripper can be a suitable solution for advanced space exploration, including climbing, lunar caves, or exploration of the surface of asteroids.