Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSmoothing and Interpolating Noisy GPS Data with Smoothing Splines
Paper and Code
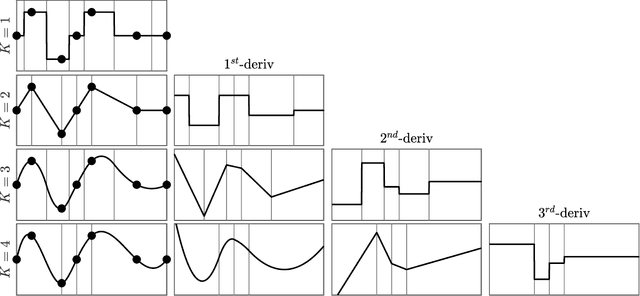
A comprehensive methodology is provided for smoothing noisy, irregularly sampled data with non-Gaussian noise using smoothing splines. We demonstrate how the spline order and tension parameter can be chosen \emph{a priori} from physical reasoning. We also show how to allow for non-Gaussian noise and outliers which are typical in GPS signals. We demonstrate the effectiveness of our methods on GPS trajectory data obtained from oceanographic floating instruments known as drifters.
* 14 pages, 8 figures
View paper on