 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSlip detection for grasp stabilisation with a multi-fingered tactile robot hand
Paper and Code
Oct 05, 2020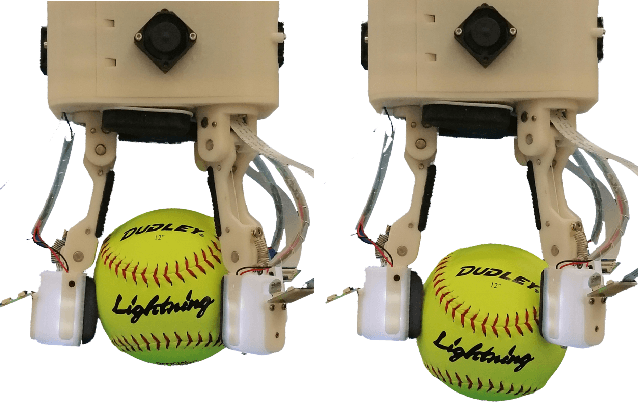
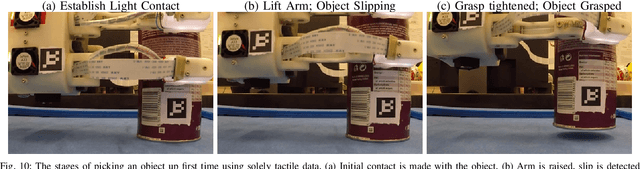
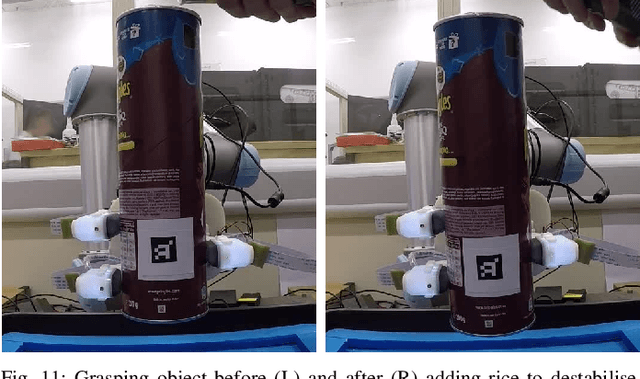
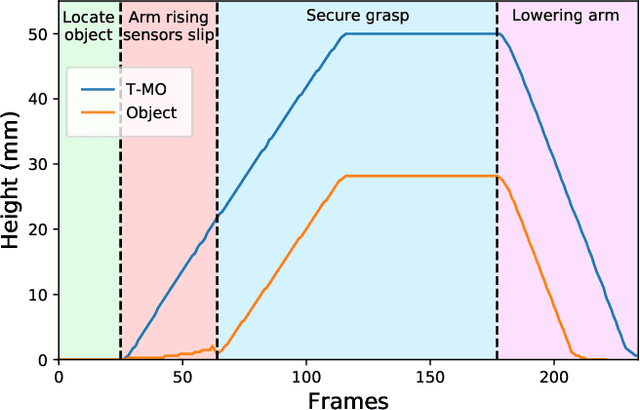
Tactile sensing is used by humans when grasping to prevent us dropping objects. One key facet of tactile sensing is slip detection, which allows a gripper to know when a grasp is failing and take action to prevent an object being dropped. This study demonstrates the slip detection capabilities of the recently developed Tactile Model O (T-MO) by using support vector machines to detect slip and test multiple slip scenarios including responding to the onset of slip in real time with eleven different objects in various grasps. We demonstrate the benefits of slip detection in grasping by testing two real-world scenarios: adding weight to destabilise a grasp and using slip detection to lift up objects at the first attempt. The T-MO is able to detect when an object is slipping, react to stabilise the grasp and be deployed in real-world scenarios. This shows the T-MO is a suitable platform for autonomous grasping by using reliable slip detection to ensure a stable grasp in unstructured environments. Supplementary video: https://youtu.be/wOwFHaiHuKY