 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSkiMap: An Efficient Mapping Framework for Robot Navigation
Paper and Code
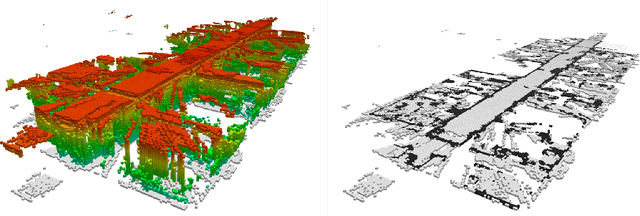
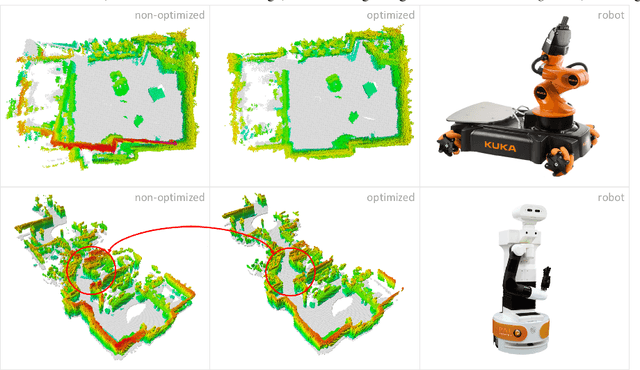
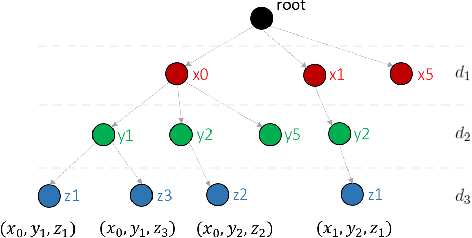
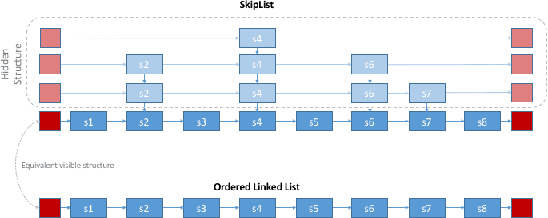
We present a novel mapping framework for robot navigation which features a multi-level querying system capable to obtain rapidly representations as diverse as a 3D voxel grid, a 2.5D height map and a 2D occupancy grid. These are inherently embedded into a memory and time efficient core data structure organized as a Tree of SkipLists. Compared to the well-known Octree representation, our approach exhibits a better time efficiency, thanks to its simple and highly parallelizable computational structure, and a similar memory footprint when mapping large workspaces. Peculiarly within the realm of mapping for robot navigation, our framework supports realtime erosion and re-integration of measurements upon reception of optimized poses from the sensor tracker, so as to improve continuously the accuracy of the map.