 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSingle-Stage Object Detection from Top-View Grid Maps on Custom Sensor Setups
Paper and Code
Feb 03, 2020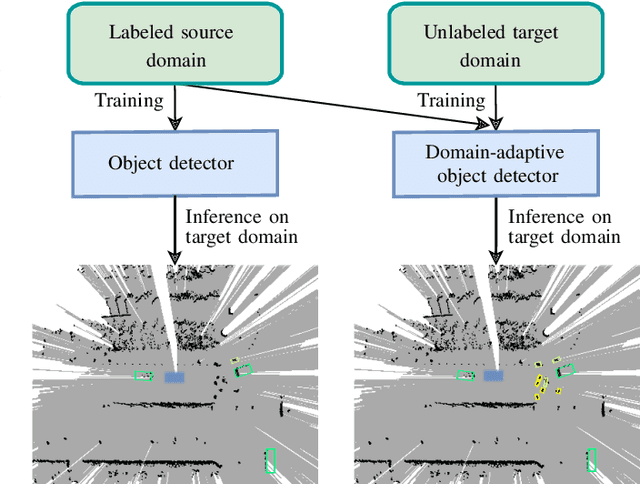



We present our approach to unsupervised domain adaptation for single-stage object detectors on top-view grid maps in automated driving scenarios. Our goal is to train a robust object detector on grid maps generated from custom sensor data and setups. We first introduce a single-stage object detector for grid maps based on RetinaNet. We then extend our model by image- and instance-level domain classifiers at different feature pyramid levels which are trained in an adversarial manner. This allows us to train robust object detectors for unlabeled domains. We evaluate our approach quantitatively on the nuScenes and KITTI benchmarks and present qualitative domain adaptation results for unlabeled measurements recorded by our experimental vehicle. Our results demonstrate that object detection accuracy for unlabeled domains can be improved by applying our domain adaptation strategy.