Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimultaneous Receding Horizon Estimation and Control of a Fencing Robot using a Single Camera
Paper and Code
Apr 14, 2015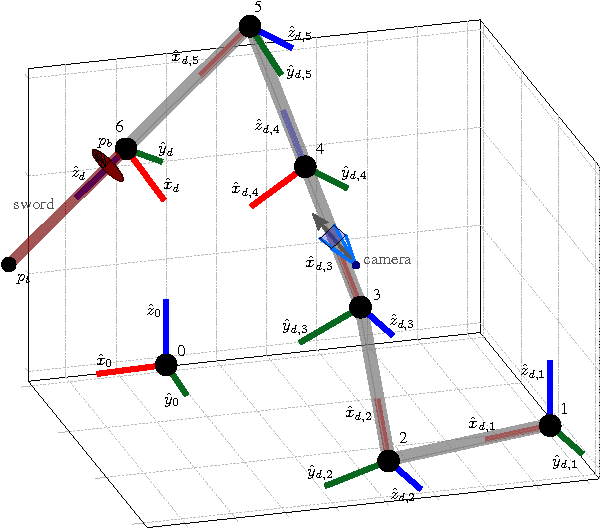
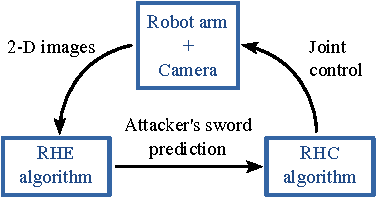
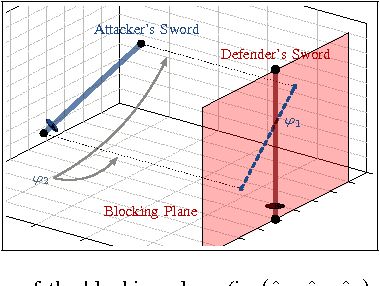
We present a method for simultaneous Receding Horizon Estimation and Control of a robotic arm equipped with a sword in an adversarial situation. Using a single camera mounted on the arm, we solve the problem of blocking a opponent's sword with the robot's sword. Our algorithm uses model-based sensing to estimate the opponent's intentions from the camera's observations, while it simultaneously applies a control action to both block the opponent's sword and improve future camera observations.
View paper on